ACM Transactions on Graphics
(SIGGRAPH Asia 2014),
Vol.33, No.6, 2014.
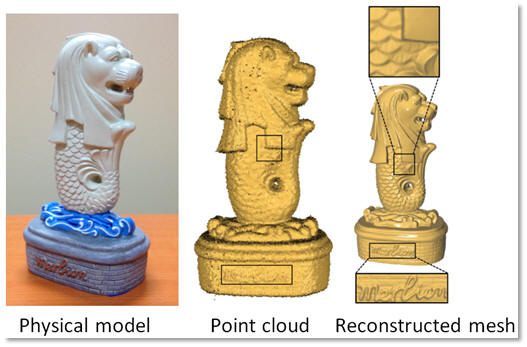
Surface reconstruction from point cloud is of great practical
importance in computer graphics. Existing methods often realize reconstruction
via a few phases with respective goals, whose integration may not give an
optimal solution. In this paper, to avoid the inherent limitations of
multi-phase processing in the prior art, we propose a unified framework that
treats geometry and connectivity construction as one joint optimization problem.
The framework is based on dictionary learning in which the dictionary consists
of the vertices of the reconstructed triangular mesh and the sparse coding
matrix encodes the connectivity of the mesh. The dictionary learning is
formulated as a constrained L_{2,q}-optimization (0 < q < 1), aiming to find the
vertex position and triangulation that minimize an energy function composed of
point-to-mesh metric and regularization. Our formulation takes many factors into
account within the same framework, including distance metric, noise/outlier
resilience, sharp feature preservation, no need to estimate normal, etc., thus
providing a global and robust algorithm that is able to efficiently recover a
piecewise smooth surface from dense data points with imperfections.
P.Song, C.W.Fu, P.Goswami, J. Zheng, N.Mitra, D.Cohen-Or (2013)
ACM Transactions on Graphics
(SIGGRAPH 2013),
Vol.32, No.4, 2013.
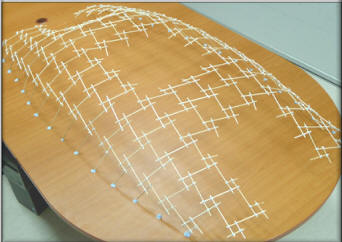
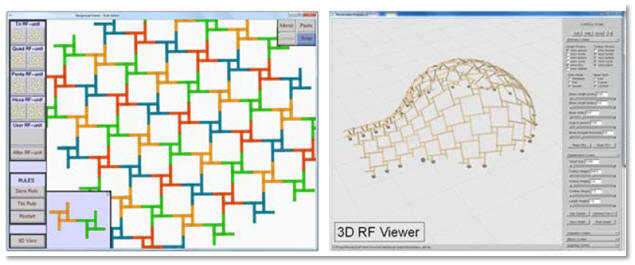
A reciprocal frame (RF) is a self-supported 3D
structure made up of three or more sloping rods, which form a closed circuit.
Large RF-structures built as complex grillages of one or a few similar circuits
have an intrinsic beauty derived from their inherent self-similar and highly
symmetric patterns. This paper presents an interactive computational tool for
designing large RF-structures over a 3D guiding surface. Users can sketch
designs with a wide variety of RF patterns and interactively modify the
appearance and parameters with preview, and the tool ensures the design's
structure connectivity and coherence. The work contains three key technical
components: (1) we draw an analogy between RF-structures and plane tiling with
regular polygons, and develop a computational scheme to generate coherent RF-tessellations
from simple grammar rules; (2) we employ a conformal mapping to lift the 2D
tessellation over a 3D guiding surface, allowing a real-time preview and
efficient exploration of wide ranges of RF design parameters; and (3) we devise
an optimization method to guarantee the collinearity of contact joints along
each rod, while preserving the geometric properties of the RF-structure.
ACM Transactions on Graphics
(presented at SIGGRAPH 2012),
Vol.31, No.3, 2012.
This paper presents a variational mesh decomposition algorithm
that can efficiently partition a mesh into a prescribed number of segments. The
algorithm extends the Mumford-Shah model to 3D meshes, which simultaneously
handles segmentation and boundary smoothing. The efficiency is achieved by
solving the Mumford-Shah model through a saddle-point problem that is solved by
a fast primal-dual method. A pre-process step is also proposed to determine the
number of segments that the mesh should be decomposed into. By incorporating
this pre-processing step, the proposed algorithm can automatically segment a
mesh into meaningful parts. Furthermore, user interaction is allowed by
incorporating user's inputs into the variational model to reflect user's special
intention.
T. Sederberg, D.Cardon, G.Finnigan, N.North, J. Zheng, T.
Lyche (2004)
A
typical NURBS surface model has a large percentage of superfluous control
points that significantly interfere with the design process. This paper presents
an algorithm for eliminating such superfluous control points, producing a T-spline. The paper also presents a new
T-spline
local refinement algorithm and answers two fundamental open questions on T-spline
theory.
T. Sederberg, J. Zheng, A. Bakenov, A. Nasri (2003)
"T-splines
and T-NURCCs" ACM Transactions on Graphics
(SIGGRAPH 2003),
Vol.22, No.3, pp 477-484,
2003.
This paper presents a generalization
of non-uniform B-spline surfaces called T-splines. T-splines permit T-junctions
in their control grid, and thus support many valuable operations. T-NURCCs (Non-Uniform
Rational Catmull-Clark Surfaces with T-junctions) are a superset of both T-splines
and Catmull- Clark surfaces. Thus, a modeling program for T-NURCCs can handle any
NURBS or Catmull-Clark model as special cases.
ACM Transactions on Graphics,
Vol.19, No.1, pp 56-77, 2000.
This paper presents a method for determining
a priori
a constant parameter interval for tessellating a rational curve or surface such
that the deviation of the curve or surface from its piecewise linear
approximation is within a specified tolerance. The parameter interval is
estimated based on information about second-order derivatives in the homogeneous
coordinates, instead of using affine coordinates directly.
T. Sederberg, J. Zheng, D. Sewell, M. Sabin (1998)
This paper
develops rules for non-uniform Doo-Sabin and Catmull-Clark surfaces
that generalize non-uniform tensor product Bspline surfaces to arbitrary
topologies. This added flexibility allows, among other things, the
natural introduction of features such as cusps, creases, and darts,
while else where maintaining the same order of continuity as their uniform
counterparts.
IEEE Transactions on Pattern
Analysis and Machine Intelligence, in press, 2018.
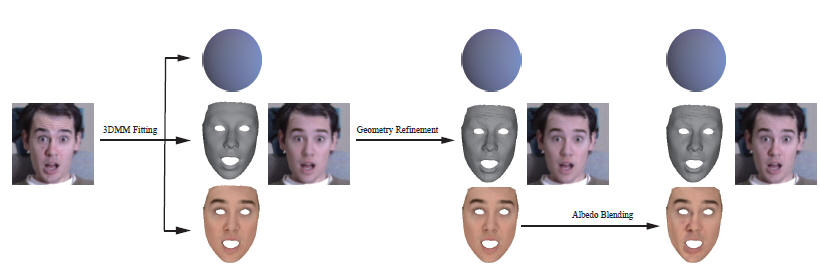
With the
powerfulness of convolution neural networks (CNN), CNN based face
reconstruction has recently shown promising performance in reconstructing
detailed face shape from 2D face images. The success of CNN-based methods
relies on a large number of labeled data. The state-of-the-art synthesizes
such data using a coarse morphable face model, which however has difficulty
to generate detailed photo-realistic images of faces (with wrinkles). This
paper presents a novel face data generation method. Specifically, we render
a large number of photo-realistic face images with different attributes
based on inverse rendering. Furthermore, we construct a fine-detailed face
image dataset by transferring different scales of details from one image to
another. We also construct a large number of video-type adjacent frame pairs
by simulating the distribution of real video data. With these nicely
constructed datasets, we propose a coarse-to-fine learning framework
consisting of three convolutional networks. The networks are trained for
real-time detailed 3D face reconstruction from monocular video as well as
from a single image. Extensive experimental results demonstrate that our
framework can produce high-quality reconstruction but with much less
computation time compared to the state-of-the-art. Moreover, our method is
robust to pose, expression and lighting due to the diversity of data.
D.Xu, Q.Duan, J. Zheng,
J.Zhang,J.Cai, T.J.Cham
(2018)
IEEE Transactions on Pattern
Analysis and Machine Intelligence 40(2), 2018.
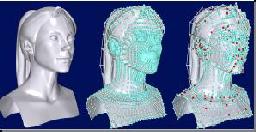
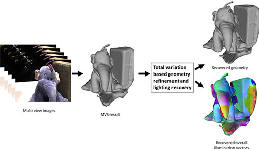
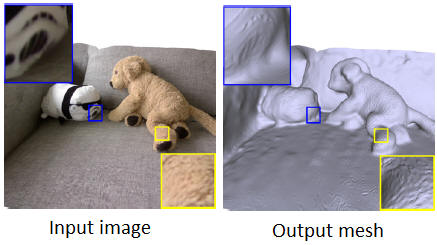
Reconstructing
the shape of a 3D object from multi-view images under unknown, general
illumination is a fundamental problem in computer vision. High quality
reconstruction is usually challenging especially when fine detail is needed
and the albedo of the object is non-uniform. This paper introduces vertex
overall illumination vectors to model the illumination effect and presents a
total variation (TV) based approach for recovering surface details using
shading and multi-view stereo (MVS). Behind the approach are the two
important observations: (1) the illumination over the surface of an object
often appears to be piecewise smooth and (2) the recovery of surface
orientation is not sufficient for reconstructing the surface, which was
often overlooked previously. Thus we propose to use TV to regularize the
overall illumination vectors and use visual hull to constrain partial
vertices. The reconstruction is formulated as a constrained TV-minimization
problem that simultaneously treats the shape and illumination vectors as
unknowns. An augmented Lagrangian method is proposed to quickly solve the
TV-minimization problem. As a result, our approach is robust, stable and is
able to efficiently recover high-quality surface details even when starting
with a coarse model obtained using MVS. These advantages are demonstrated by
extensive experiments on the state-of-the-art MVS database, which includes
challenging objects with varying albedo.
P.Jayaraman, C.W.Fu, J. Zheng,
X.Liu, T.Wong
(2018)
IEEE Transactions on Visualization
and Computer Graphics 24(7): 2103-2117, 2018.
Shading is a
tedious process for artists involved in 2D cartoon and manga production
given the volume of contents that the artists have to prepare regularly over
tight schedule. While we can automate shading production with the presence
of geometry, it is impractical for artists to model the geometry for every
single drawing. In this work, we aim to automate shading generation by
analyzing the local shapes, connections, and spatial arrangement of wrinkle
strokes in a clean line drawing. By this, artists can focus more on the
design rather than the tedious manual editing work, and experiment with
different shading effects under different conditions. To achieve this, we
have made three key technical contributions. First, we model five perceptual
cues by exploring relevant psychological principles to estimate the local
depth profile around strokes. Second, we formulate stroke interpretation as
a global optimization model that simultaneously balances different
interpretations suggested by the perceptual cues and minimizes the
interpretation discrepancy. Lastly, we develop a wrinkle-aware inflation
method to generate a height field for the surface to support the shading
region computation. In particular, we enable the generation of two
commonly-used shading styles: 3D-like soft shading and manga-style flat
shading.
IEEE Transactions on
Industrial Informatics 14(3): 829-845, 2018.
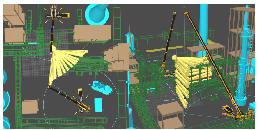
Cooperative
dual-crane lifting is an important but challenging process involved in heavy
and critical lifting tasks. This paper considers the path planning for the
cooperative dual-crane lifting. It aims to automatically generate optimal
dual-crane lifting paths under multiple constraints, i.e., collision
avoidance, coordination between the two cranes, and balance of the lifting
target. Previous works often used oversimplified models for the dual-crane
lifting system, the lifting environment, and the motion of the lifting
target. They were thus limited to simple lifting cases and might even lead
to unsafe paths in some cases. We develop a novel path planner for
dual-crane lifting that can quickly produce optimized paths in complex 3-D
environments. The planner has fully considered the kinematic structure of
the lifting system. Therefore, it is able to robustly handle the nonlinear
movement of the suspended target during lifting. The effectiveness and
efficiency of the planner are enabled by three novel aspects: 1) a
comprehensive and computationally efficient mathematical modeling of the
lifting system; 2) a new multiobjective parallel genetic algorithm designed
to solve the path planning problem; and 3) a new efficient approach to
perform continuous collision detection for the dual-crane lifting target.
The planner has been tested in complex industrial environments. The results
show that the planner can generate dual-crane lifting paths that are easy
for conductions and optimized in terms of costs for complex environments.
Comparisons with two previous methods demonstrate the advantages of the
planner, including safer paths, higher success rates, and the ability to
handle general lifting cases.
IEEE Transactions on Robotics
33(5): 1242-1247, 2017.
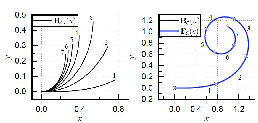
An accurate and
efficient clothoid approximation approach is presented in this paper using
Bézier curves based on the minimization of curvature profile difference.
Compared with existing methods, the proposed approach is able to guarantee
higher order geometric continuity with smaller approximation error in terms
of position, orientation, and curvature. The approximation scheme takes
place in three stages. First, a subset of clothoids with specific winding
angle constraints referred to as elementary clothoids is approximated using
quintic Bézier curves. Then, a basic clothoid defined in the first quadrant
is formulated, which is composed of a series of transformed elementary
clothoids. An adaptive sampling stra-tegy is applied to ensure that the
resulting Bézier segments are computed within a specified accuracy and all
the required information can be obtained offline and stored in a lookup
table. Finally, a general clothoid with arbitrary parameters can be
conveniently approximated based on the lookup table through appropriate
geometric transformations. A comparison with the recent circular
interpolation and rational Bézier curve based approximation shows that the
proposed approach is able to achieve equivalent or greater computational
efficiency in most scenarios.
H.Zhu, J.Lu, J.Cai, J. Zheng,
S.Lu, N.M.Thalmann
(2016)
IEEE Transactions on
Multimedia 18(8): 1516-1530, 2016.
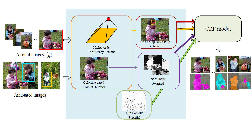
Localizing,
identifying, and extracting humans with consistent appearance jointly from a
personal photo stream is an important problem and has wide applications. The
strong variations in foreground and background and irregularly occurring
foreground humans make this realistic problem challenging. Inspired by
advancements in object detection, scene understanding, and image
cosegmentation, we explore explicit constraints to label and segment human
objects rather than other nonhuman objects and “stuff.” We refer to such a
problem as multiple human identification and cosegmentation (MHIC). To
identify specific human subjects, we propose an efficient human instance
detector by combining an extended color line model with a poselet-based
human detector. Moreover, to capture high-level human shape information, a
novel soft shape cue is proposed. It is initialized by the human detector,
then further enhanced through a generalized geodesic distance transform, and
finally refined with a joint bilateral filter. We also propose to capture
the rich feature context around each pixel by using an adaptive cross-region
data structure, which gives a higher discriminative power than a single
pixel-based estimation. The high-level object cues from the detector and the
shape are then integrated with the low-level pixel cues and midlevel contour
cues into a principled conditional random field (CRF) framework, which can
be efficiently solved by using fast graph cut algorithms. We evaluate our
method over a newly created NTU-MHIC human dataset, which contains 351
images with manually annotated groundtruth segmentation. Both visual and
quantitative results demonstrate that our method achieves state-of-the-art
performance for the MHIC task.
IEEE Transactions on Visualization
and Computer Graphics 21(3): 375-388, 2015.
Mapping texture
onto 3D meshes with positional constraints is a popular technique that can
effectively enhance the visual realism of geometric models. Such a process
usually requires constructing a valid mesh embedding satisfying a set of
positional constraints, which is known to be a challenging problem. This
paper presents a novel algorithm for computing a foldover-free piecewise
linear mapping with exact positional constraints. The algorithm begins with
an unconstrained planar embedding, followed by iterative constrained mesh
transformations. At the heart of the algorithm are radial basis function (RBF)-based
warping and the longest edge bisection (LEB)-based refinement. A delicate
integration of the RBF-based warping and the LEB-based refinement provides a
provably foldover-free, smooth constrained mesh warping, which can handle a
large number of constraints and output a visually pleasing mapping result
without extra smoothing optimization. The experiments demonstrate the
effectiveness of the proposed algorithm.
IEEE Transactions on
Image Processing, Vol.23, No.8, 2014.
This paper
presents a subdivision-based vector graphics for image representation and
creation. The graphics representation is a subdivision surface defined by a
triangular mesh augmented with color attribute at vertices and feature
attribute at edges. Special cubic B-splines are proposed to describe
curvilinear features of an image. New subdivision rules are then designed
accordingly, which are applied to the mesh and the color attribute to define
the spatial distribution and piecewise-smoothly varying colors of the image.
A sharpness factor is introduced to control the color transition across the
curvilinear edges. In addition, an automatic algorithm is developed to
convert a raster image into such a vector graphics representation. The
algorithm first detects the curvilinear features of the image, then
constructs a triangulation based on the curvilinear edges and feature
attributes, and finally iteratively optimizes the vertex color attributes
and updates the triangulation. Compared with existing vector-based image
representations, the proposed representation and algorithm have the
following advantages in addition to the common merits (such as editability
and scalability): 1) they allow flexible mesh topology and handle images or
objects with complicated boundaries or features effectively; 2) they are
able to faithfully reconstruct curvilinear features, especially in modeling
subtle shading effects around feature curves; and 3) they offer a simple way
for the user to create images in a freehand style.
IEEE Transactions on
Image Processing, Vol.22, 2013.
This paper
considers the problem of automatically segmenting an image into a small
number of regions that correspond to objects conveying semantics or
high-level structure. While such object-level
segmentation usually requires additional high-level knowledge or
learning process, we explore what low level cues can produce for
this purpose. Our idea is to construct a feature vector for each pixel,
which elaborately integrates spectral attributes, color Gaussian Mixture
Models and geodesic distance, such that it encodes global color and spatial
cues as well as global structure information. Then we formulate the Potts
variational model in terms of the feature vectors to provide a variational
image
segmentation algorithm that is performed in the feature space. We
also propose a heuristic approach to automatically select the number of
segments. The use of feature attributes enables the Potts model to produce
regions that are coherent in color and position, comply with global
structures corresponding to objects or parts of objects and meanwhile
maintain a smooth and accurate boundary.
Y.Cai, N.Chia, D.Thalmann, N.Kee, J. Zheng,
N.Thalmann
(2013)
IEEE Transactions on Neural
System and Rehabilitation Engineering, Vol.21, No.2, pp 208-217.
The recent
proliferation of virtual reality technology applications in the autism
therapy to promote learning and positive behavior among such children has
produced optimistic results in developing a variety of skills and abilities
in them. Dolphin-assisted therapy has also become a topic of public and
research interest for autism intervention and treatment. This paper presents
an innovative design and development of a virtual dolphinarium for potential
autism intervention. Instead of emulating the swimming with dolphins, our
virtual dolphin interaction program allows children with autism to act as
dolphin trainers at the poolside and to learn (non-verbal) communication
through hand gestures with the virtual dolphins. Immersive visualisation and
gesture-based interaction are implemented to engage children with autism
within an immersive room equipped with a curved screen spanning a 320 degree
and a high-end 5-panel projection system. The paper also reports a pilot
study to establish trial protocol of autism screening to explore the
participants' readiness for the virtual dolphin interaction.
IEEE Transactions on Image
Processing, Vol.21. No.8, pp 3734-3743.
The
state-of-the-art interactive image segmentation algorithms are sensitive to
the user inputs and often unable to produce an accurate boundary with a
small amount of user interaction. They frequently rely on laborious user
editing to refine the segmentation boundary. In this paper, we propose a
robust and accurate interactive method based on the recently developed
continuous-domain convex active contour model. The proposed method exhibits
many desirable properties of an effective interactive image segmentation
algorithm, including robustness to user inputs and different
initializations, the ability to produce a smooth and accurate boundary
contour, and the ability to handle topology changes. Experimental results on
a benchmark data set show that the proposed tool is highly effective and
outperforms the state-of-the-art interactive image segmentation algorithms.
IEEE Transactions on Visualization
and Computer Graphics, Vol.17, No.3, pp 357-367.
This paper
considers the problem of interactively finding
the cutting contour to extract components from an existing mesh. First, we
propose a constrained random walks algorithm that can add constraints to the
random walks procedure and thus allows for a variety of intuitive user
inputs. Second, we design an optimization process that uses the shortest
graph path to derive a nice cut contour. Then a new mesh cutting algorithm
is developed based on the constrained random walks plus the optimization
process. Within the same computational framework, the new algorithm provides
a novel user interface for interactive mesh cutting that supports three
typical user inputs and also their combinations: 1) foreground/background
seed inputs: the user draws strokes specifying seeds for “foreground” (i.e.,
the part to be cut out) and “background” (i.e., the rest); 2) soft
constraint inputs: the user draws strokes on the mesh indicating the region
which the cuts should be made nearby; and 3) hard constraint inputs: the
marks which the cutting contour must pass. The algorithm uses feature
sensitive metrics that are based on surface geometric properties and
cognitive theory. The integration of the constrained random walks algorithm,
the optimization process, the feature sensitive metrics and the varieties of
user inputs makes the algorithm intuitive, flexible, and effective as well.
The experimental examples show that the proposed cutting method is fast,
reliable, and capable of producing good results reflecting user intention
and geometric attributes.
IEEE Transactions on
Image Processing, Vol.19, No.9, pp 2470-2479.
One weakness in the existing interactive image
segmentation algorithms is the lack of more intelligent ways to understand
the intention of user inputs. In this paper, we advocate the use of multiple
intuitive user inputs to better reflect a user's intention. In particular,
we propose a constrained random walks algorithm that facilitates the use of
three types of user inputs: (1) foreground and background seed input, (2)
soft constraint input, and (3) hard constraint input, as well as their
combinations. The foreground and background seed input allows a user to draw
strokes to specify foreground and background seeds. The soft constraint
input allows a user to draw strokes to indicate the region that the boundary
should pass through. The hard constraint input allows a user to specify the
pixels that the boundary must align with. Our proposed method supports all
three types of user inputs in one coherent computational framework
consisting of a constrained random walks and a local editing algorithm,
which allows more precise contour refinement. Experimental results on two
benchmark data sets show that the proposed framework is highly effective and
can quickly and accurately segment a wide variety of natural images with
ease.
IEEE Transactions on Circuits
and Systems for Video Technology, Vol.20, No.4, pp 575-586.
For transmitting
complex 3D models over bandwidth-limited networks, efficient mesh coding and
transmission are indispensable. The state-of-the-art 3D mesh transmission
system employs wavelet-based progressive mesh coder, which converts an
irregular mesh into a semi-regular mesh and directly applies the zerotree-like
image coders to compress the wavelet vectors, and view-dependent
transmission, which saves the transmission bandwidth through only delivering
the visible portions of a mesh model. We propose methods to improve both
progressive mesh coding and transmission based on thorough rate-distortion
(RD) analysis. In particular, by noticing that the dependency among the
wavelet coefficients generated in remeshing is not being considered in the
existing approaches, we propose to introduce a preprocessing step to scale
up the wavelets so that the inherent dependency of wavelets can be truly
understood by the zerotree-like image compression algorithms. The weights
used in the scaling process are carefully designed through thoroughly
analyzing the distortions of wavelets at different refinement levels. For
the transmission part, we propose to incorporate the illumination effects
into the existing view-depend progressive mesh transmission system to
further improve the performance. We develop a novel distortion model that
considers both illumination distortion and geometry distortion. Based on our
proposed distortion model, given the viewing and lighting parameters, we are
able to optimally allocate bits among different segments in real time.
Simulation results show significant improvements in both progressive
compression and transmission.
W.Yang, J. Zheng,
J.Cai, S.Rahardja, C.Chen
(2009)
IEEE Transactions on
Image Processing, Vol.18. No.11, pp 2584-2592.
While the
state-of-the-art image composition algorithms subtly handle the object
boundary to achieve seamless image copy-and-paste, it is observed that they
are unable to preserve the color fidelity of the source object, often
require quite an amount of user interactions, and often fail to achieve
realism when there exists salient discrepancy between the background
textures in the source and destination images. These observations motivate
our research towards color controlled natural and seamless image composition
with least user interactions. In particular, based on the Poisson image
editing framework, we first propose a variational model that considers both
the gradient constraint and the color fidelity. The proposed model allows
users to control the coloring effect caused by gradient domain fusion.
Second, to have less user interactions, we propose a distance-enhanced
random walks algorithm, through which we avoid the necessity of accurate
image segmentation while still able to highlight the foreground object.
Third, we propose a multiresolution framework to perform image compositions
at different subbands so as to separate the texture and color components to
simultaneously achieve smooth texture transition and desired color control.
The experimental results demonstrate that our proposed framework achieves
better and more realistic results for images with salient background color
or texture differences, while providing comparable results as the
state-of-the-art algorithms for images without the need of preserving the
object color fidelity and without significant background texture
discrepancy.
IEEE Transactions on
Multimedia, Vol.10. No.5, pp 724-734.
For wireless
network based graphics applications, a key challenge is how to efficiently
transmit complex 3-D models over bandwidth-limited wireless channels. Most
existing 3-D mesh transmission systems do not consider such a view-dependent
delivery issue, and thus transmit unnecessary portions of 3-D mesh models,
which leads to the waste in precious wireless network bandwidth. In this
paper, we propose a novel view-dependent 3-D model transmission scheme,
where a 3-D model is partitioned into a number of segments, each segment is
then independently coded using the MPEG-4 3DMC coding algorithm, and finally
only the visible segments are selected and delivered to the client.
Moreover, we also propose analytical models to find the optimal number of
segments so as to minimize the average transmission size. Simulation results
show that such a view-based 3-D model transmission is able to substantially
save the transmission bandwidth and therefore has a significant impact on
wireless graphics applications.
IEEE Transactions on Visualization
and Computer Graphics, Vol.12. No.3, pp 301-310.
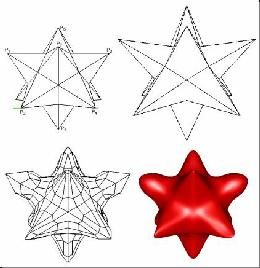
This paper presents a two-phase process, based on a topological modification of the control mesh and a subsequent
Catmull-Clark subdivision, to construct a smooth surface that interpolates some or all of the vertices of a mesh with arbitrary topology. It is also possible to constrain the surface to have specified tangent planes at an arbitrary subset of the vertices to be
interpolated. The method has following features: (1) it is guaranteed to always work and the computation is numerically stable; (2) there is no need to solve a system of linear equations and the whole
computation complexity is O(K) where K is the number of the vertices; and (3) each vertex can be associated with a scalar shape handle for local shape control. These features make interpolation using
Catmull-Clark surfaces simple and thus make the new method itself suitable for interactive freeform shape design.
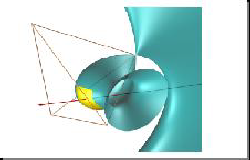
Recent advance of
Additive Manufacturing technologies allows us to manufacture various parts used
in real-world products. Consequently, product tracking of such 3D printed parts
is an important issue. Quick Response (QR) code which is a two-dimensional
matrix barcode invented by Denso, a Japanese automotive industry, in 1994, can
be used for this purpose. It can store more data than the 1D barcode in a
smaller space, and using a smartphone as a scanner, one can directly visit a
website where all the information of the parts is stored. However, QR codes
require secondary procedures to add them to products and are also vulnerable to
wear and tear. Moreover, QR codes cannot be added to freeform surfaces, but only
to developable surfaces. In this paper we propose a novel technique to embed QR
codes onto CAD models consisting of freeform surfaces represented by B-spline
surfaces, which produces 3D QR codes. 3D QR codes work similar to 2D QR codes
and can be read by existing QR scanners, but are designed by grooving the
surface to obtain light and dark regions caused by ambient occlusion. Unlike
conventional QR codes, 3D QR codes do not fall off from the part and can even be
painted if necessary. Furthermore, we do not need to prepare dark-colored and
light-colored materials for 3D printing as the dark color is provided by the
grooving. We demonstrate the effectiveness of our technique with various
examples.
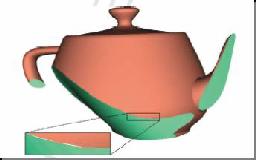
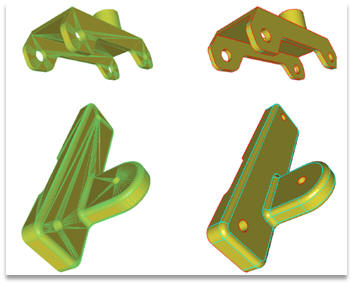
Reverse engineering
of 3D industrial objects such as automobiles and electric appliances is
typically performed by fitting B-spline surfaces to scanned point cloud data
with a fairing term to ensure smoothness, which often smooths out sharp
features. This paper proposes a radically different approach to constructing
fair B-spline surfaces, which consists of fitting a surface without a fairing
term to capture sharp edges, smoothing the normal field of the constructed
surface with feature preservation, and reconstructing the B-spline surface from
the smoothed normal field. The core of our method is an image processing based
feature-preserving normal field fairing technique. This is inspired by the
success of many recent research works on the use of normal field for
reconstructing mesh models, and makes use of the impressive simplicity and
effectiveness of bilateral-like filtering for image denoising. In particular,
our approach adaptively partitions the B-spline surface into a set of segments
such that each segment has approximately uniform parameterization, generates an
image from each segment in the parameter space whose pixel values are the normal
vectors of the surface, and then applies a bilateral filter in the parameter
domain to fair the normal field. As a result, our approach inherits the
advantages of image bilateral filtering techniques and is able to effectively
smooth B-spline surfaces with feature preservation as demonstrated by various
examples.
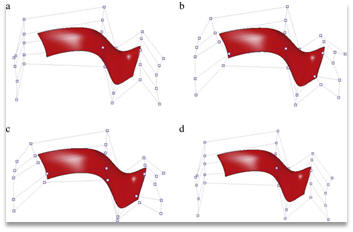
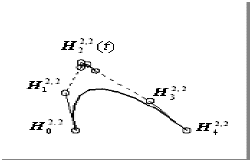
Planar Bézier curves
that have rationally parameterized offsets can be classified into two classes.
The first class is composed of curves that have Pythagorean hodographs (PH) and
the second class is composed of curves that do not have PHs but can have
rational PHs after reparameterization by a fractional quadratic transformation.
This paper reveals a geometric characterization for all properly-parameterized
cubic Bézier curves in the second class. The characterization is given in terms
of Bézier control polygon geometry. Based on the derived conditions, we also
present a simple geometric construction of
Hermite interpolation using such Bézier curves. The construction results in a
one-parameter family of curves if a solution exists. We further prove that there
exists a unique value of the parameter which minimizes the integral of the
squared norm of the second order derivative of the curves.
T-spline is a new
approach to define freeform surfaces with relatively less control points than
NURBS and is able to represent a model using a single surface without joining
errors. Whereas, the complexity of T-spline data models leads numerous
difficulties in its programming, which hinders the research and development of
T-spline technologies. In addition, the data exchange of T-spline models still
remains on a primitive level, and no standardized data format has been published
so far. This article gives a reconsideration to the existing T-spline
definitions, and proposes a set of redesigned data models which have much more
understanding conveniences to both human and computer. Moreover, STEP-compliant
data models are designed using the proposed T-spline models to standardize their
data exchange between different CAx systems. The combination of T-spline with
other product models in ISO 10303 makes it convenient to exchange the versatile
resource data in a hybrid neutral file. A prototype system is developed for the
validation purpose, which consists of a TSM-to-STEP convertor, a STEP parser and
a T-spline kernel. Using the developed prototype system, one can automatically
convert a Rhino system exported TSM file to a STEP file in the P21 format, which
can be then parsed using the STEP reader and processed by the T-spline kernel.
Some testing examples show that the proposed data models are much more efficient
in processing and exchanging the T-spline data.
A generic planar
quadrilateral defines a 2:1 bilinear map. We show that by assigning an
appropriate weight to one vertex of any planar quadrilateral, we can create a
map whose inverse is rational linear.
Estimating
principal curvatures and principal directions of a subjacent, unknown, smooth
surface represented by a triangular mesh is an important step in computer aided
design and graphics applications. This paper presents a new method for curvature
tensor estimation on a triangular mesh by replacing flat triangles with
triangular parametric patches and computing Taubin integral---a 3x3 symmetric
matrix in integral formulation---based on the parametric patches. Principal
curvatures and principal directions are then computed from Taubin integral. The
method has two novel technical ingredients: (1) a closed form expression of
Taubin integral is derived; and (2) an explicit scheme is developed for
constructing a cubic triangular Bezier patch from a triangle with three corner
normals, which interpolates the three corner positions and normals with its
boundary curves having local cylindrical precision at their two endpoints. All
the computations in the new method are direct in closed form, and except for the
approximation of the subjacent surface by piecewise interpolating patches, all
other calculations are exact. These features make the new method accurate,
efficient and robust.
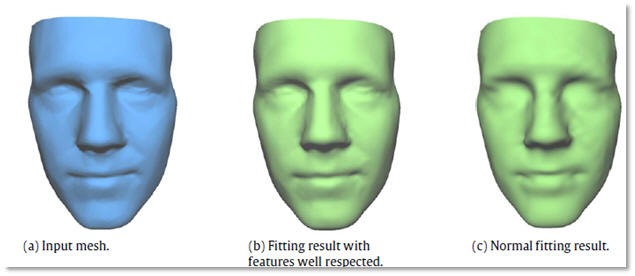
The problem of
fitting spline surfaces to triangular mesh models is of importance in
computer-aided design. Many fitting algorithms have been developed. This paper
proposes several novel plug-and-play components or strategies:
the use ofT-splines
for fitting, a curvature-guided strategy, faithful re-parameterization and
initial spline knot re-placement, which can
be used to enhance fitting algorithms. An adaptive
T-spline
fitting algorithm integrating these components and strategies is also presented.
The fitting algorithm can generate spline surfaces that well respect the
geometrical features of input mesh models and have a more compact
representation..
This paper presents
two watermarking methods for NURBS curves and surfaces. Both methods are blind,
shape-preserving and data amount-preserving. These features are often required
in watermarking of CAD models. The first method is based on the replacement of
exterior knots of NURBS. Watermarks are embedded into the cross-ratio of four
knots in the knot vector(s) and the method is robust to affine transformation,
Möbius reparameterization, and interior knot insertion and removal operations.
The second method is based on reparameterization using Möbius transformation.
Watermarks are embedded into the ratio of two knot intervals selected from the
knot vector(s) and the method is robust to affine transformation and linear
reparameterization. The capacity of the first method is
m−1
for a degree
m
NURBS curve and
m+n−2
for a degree
m×n
NURBS surface, and the capacity of the second method is 1 for a curve and 2 for
a surface. Experiments have been conducted to demonstrate the shape-preserving,
data amount-preserving properties and robustness.
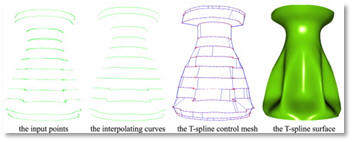
This paper
considers the problem of constructing a smooth surface to fit rows of data
points. A special class of
T-spline
surfaces is examined, which is characterized to have a global knot vector in one
parameter direction and individual knot vectors from row to row in the other
parameter direction. These
T-spline
surfaces are suitable for lofted surface interpolation or approximation. A
skinning algorithm using these
T-spline
surfaces is proposed, which does not require the knot compatibility of sectional
curves. The algorithm consists of three main steps: generating sectional curves
by interpolating data points of each row by a
B-spline
curve; computing the control curves of a skinning surface that interpolates the
sectional curves; and approximating each control curve by a
B-spline
curve with fewer knots, which results in a
T-spline
surface. Compared with conventional
B-spline
surface skinning, the proposed
T-spline
surface skinning has two advantages. First, the sectional curves and the control
curves of a
T-spline
surface can be constructed independently. Second, the generated
T-spline
skinning surface usually has much fewer control points than a lofted
B-spline
surface that fits the data points with the same error bound. Experimental
examples have demonstrated the effectiveness of the proposed algorithm.
This paper presents
a new perspective for constructing interpolatory subdivision from primal
approximating subdivision. The basic idea is constructing the subdivision rule
for new inserted vertices of a new interpolatory subdivision scheme based on an
approximating subdivision algorithm applied to a local configuration of the mesh
with one vertex updated for interpolation of the vertex. This idea is
demonstrated by presenting two new interpolatory subdivision schemes based on
Catmull–Clark subdivision for an arbitrary polygonal mesh and Loop subdivision
for a triangular mesh, respectively. These algorithms are simple and have a
small stencil for computing new points. The new perspective also shows a link
between those classic approximating and interpolatory subdivision algorithms
such as cubic B-spline curve subdivision and the four-point interpolatory
subdivision, Catmull–Clark subdivision and Kobbelt's interpolatory scheme, and
Loop subdivision and the butterfly algorithm.
X. Li, J. Zheng, T. Sederberg,
T.Hughes, M.Scott (2012)
This paper shows
that, for any given T-spline, the linear independence of its blending functions
can be determined by computing the nullity of the T-spline-to-NURBS transform
matrix. The paper analyzes the class of T-splines for which no perpendicular
T-node extensions intersect, and shows that the blending functions for any such
T-spline are linearly independent.
P. Chiang, J. Zheng, K. Mak,
N.Thalmann, Y.Cai (2012)
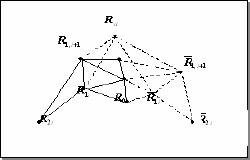
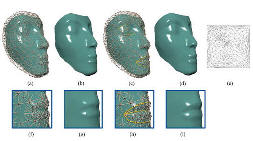
The composite
imaging of measured cardiac properties on a reconstructed endocardial surface
allows for the diagnosis of cardiac arrhythmia and myocardial infarct. This
paper presents a new method for the progressive reconstruction of an endocardial
surface during a heart mapping procedure. A generic mesh is first aligned with a
set of anchor points to obtain a first approximation of the surface. Subsequent
deformations are constrained by the preservation of local surface
characteristics and the fidelity of new contract points. The mesh is refined by
local subdivision and its geometrical shape is further improved by edge
swapping. Compared to prior art, the new method can reconstruct a realistic
surface from a set of sparse and random data. It can advantageously provide a
smooth reconstruction at initial acquisition and ensure a geometrical
consistency between consecutive reconstructions. The accurate reconstruction of
a heart chamber provides important visual cues for an interventionalist to
decide on the next mapping site, thus constructively influencing the final
diagnosis.
This paper
proposes to use rational Bézier surfaces as a uniform approach to model all
three types of molecular surfaces: van der Waals surface, solvent accessible
surface and solvent excluded surface. The solution consists of three steps:
topology modeling, boundary modeling and surface modeling. First, using
weighted
α-shape, topology modeling creates two networks to describe the
neighboring relationship of the molecular atoms. Second, boundary modeling
derives all boundary arcs from the networks. Third, surface modeling
constructs all three types of molecular surfaces patch-by-patch based on the
networks and the boundary arcs. For SES, the singularity is specially
treated to avoid self-intersections. Instead of approximation, the proposed
solution can produce precise shapes of molecular surfaces. Since rational
Bézier representation is much simpler than trimmed NURBS, computational load
can be significantly saved when dealing with molecular surface modeling.
This research shows that the rational Bézier representations, more
specifically, bi-cubic or 2×4 rational Bézier surfaces, are sufficient for
kernel modeling of molecular surfaces and related applications.
This paper presents
a solution to the problem of reparameterizing a rational curve by a Moebius
transformation such that the maximal ratio of weights in the reparameterized
representation is minimized. The problem is reduced to solving a linear
programming problem, which can be solved directly and simply. The result can be
used to reparameterize rational curves so as to yield tight bounds on
derivatives.
This paper proposes
to use target curvature plots to identify bad points or bad curve segments of a
given B-spline curve. Then the control points of the curve are modified by a
local constrained optimization, which involves the shape fairness and the
coherence to the original design. The target curvature plots are prescribed by
designers according to their design intention.
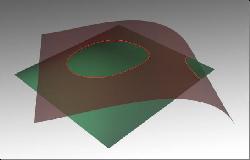
By applying
displacement maps to slightly perturb two free-form surfaces, one can ensure exact
agreement between the images in R^3
of parameter-domain approximations to their curve of intersection. Thus, at the
expense of slightly altering the surfaces in the vicinity of their intersection,
a perfect matching of the surface trimming curves is guaranteed. This exact
agreement of contiguous trimmed surfaces is essential to achieving topologically
consistent solid model constructions through Boolean operations, and has a
profound impact on the efficiency and reliability of applications such as
meshing, rendering, and computing volumetric properties.
This paper provides
some evidences to show that if two surface patches intersect with G1
continuity along an entire curve, the probability is one that the curve is
rational. This idea has significance for surface intersection algorithms.
This paper derives
formulae for Gaussian and mean curvatures for rational Bézier surface patches.
The formulae are expressed in terms of simple geometric quantities (lengths and
areas) obtained from the control mesh. These formulae provide more geometric
intuition and are easier to compute than the generic formulae from differential
geometry. Both the tensor product and triangular patch cases are addressed.
This paper studies the merits of using knot interval notation for B-spline
curves. Using knot interval notation, the paper introduces MD-splines, which are
B-spline-like curves that are comprised of polynomial segments of various
degrees (MD stands for "multi-degree"). The paper focuses on MD-splines
of degree 1, 2, and 3, as well as degree 1 and n.
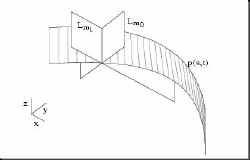
This
paper presents a simple
algorithm for computing the mu-basis for a rational ruled
surface. The mu-basis consists of two polynomials p(x,y,z,s)
and q(x,y,z,s) that are linear in x,y,z
and degree mu
and m-mu
in s respectively, where m is the degree of the implicit equation.
The implicit equation of the surface is then obtained by merely taking the
resultant of p and q with respect to s. This
implicitization algorithm is faster and/or more robust than previous methods.
This
paper derives the constraints on the homogeneous surface belonging to a certain
rational surface that are both necessary and sufficient to ensure
that the rational surface is nth-order geometric continuous. This gives
up the strong restriction that requires the homogeneous surface to be as smooth
as the rational surface. Further the conditions for the rectangular rational Bézier
patches are developed, and some simple and practical sufficient conditions are
presented which might give a valid means for the construction of GCn
connecting surfaces.
This paper discusses
the curvature continuity between two adjacent rational Bézier surfaces. The necessary and sufficient
conditions are derived, and further, a series of simple sufficient conditions
are developed. With them one can both check the geometric continuity between two
surfaces and construct a rational surface possessing curvature continuity with a
given rational patch along a certain boundary.
"Shading-based surface recovery using subdivision-based representation"
Computer Graphics Forum, in
press, 2018.
This paper
presents subdivision-based representations for both lighting and geometry in
shape-from-shading. A very recent shading-based method introduced a per-vertex
overall illumination model for surface reconstruction, which has advantage of
conveniently handling complicated lighting condition and avoiding explicit
estimation of visibility and varied albedo. However, due to its discrete nature,
the per-vertex overall illumination requires a large amount of memory and lacks
intrinsic coherence. To overcome these problems, in this paper we propose to use
classic subdivision to define the basic smooth lighting function and surface,
and introduce additional independent variables into the subdivision to
adaptively model sharp changes of illumination
and geometry. Compared to previous works, the new model not only preserves the
merits of the per-vertex illumination model, but also greatly reduces the number
of variables required in surface recovery and intrinsically regularizes the
illumination vectors and the surface. These features make the new model very
suitable for multi-view stereo surface reconstruction under general, unknown
illumination condition. Particularly, a variational surface reconstruction
method built upon the subdivision representations for lighting and geometry is
developed.
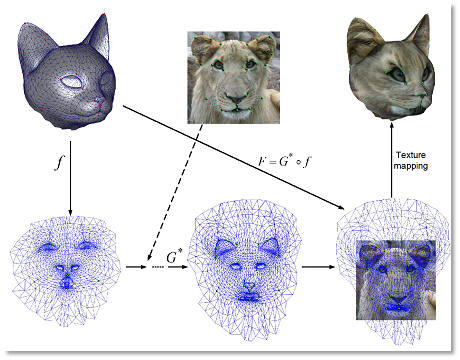
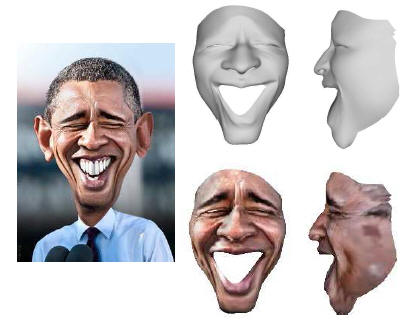
Caricature is an
art form that expresses subjects in abstract, simple and exaggerated views.
While many caricatures are 2D images, this paper presents an algorithm for
creating expressive 3D caricatures from 2D caricature images with minimum user
interaction. The key idea of our approach is to introduce an intrinsic
deformation representation that has the capability of extrapolation, enabling us
to create a deformation space from standard face datasets, which maintains face
constraints and meanwhile is sufficiently large for producing exaggerated face
models. Built upon the proposed deformation representation, an optimization
model is formulated to find the 3D caricature that captures the style of the 2D
caricature image automatically. The experiments show that our approach has
better capability in expressing caricatures than those fitting approaches
directly using classical parametric face models such as 3DMM and FaceWareHouse.
Moreover, our approach is based on standard face datasets and avoids
constructing complicated 3D caricature training sets, which provides great
flexibility in real applications.
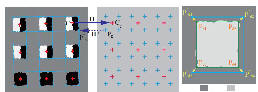
A fundamental
step to employ RGB-D cameras is to register color and depth images, whose
misalignment may be caused by differences of camera poses and parameters, depth
noises, etc. Previous methods mainly devote to more accurate camera calibration,
which can only deal with misalignment that are parameterized with camera
projection model. Other misalignment, which we call
deviations, are more difficult to be
measured and modeled. In this paper, we propose a method to model and remove RGB-D
camera deviations. First, a specially-designed checkerboard with hollow squares
is utilized to measure deviations and camera parameters, it takes advantage of
the regularity of corner arrangements and can achieve high accuracy even with
noisy depth inputs. Second, we propose a general deviation model to deal with
irregular deviations that can not be handled by RGB-D camera projection model.
Third, we introduce a registration method that incorporates the estimated
deviation model to well register color and depth information. As demonstrated in
the experiments, comparing with manufacturer’s calibration and some
state-of-the-art algorithms, our approach produces significant better accuracy.
J. Computational Applied
Mathematics 327:
260-273, 2018.
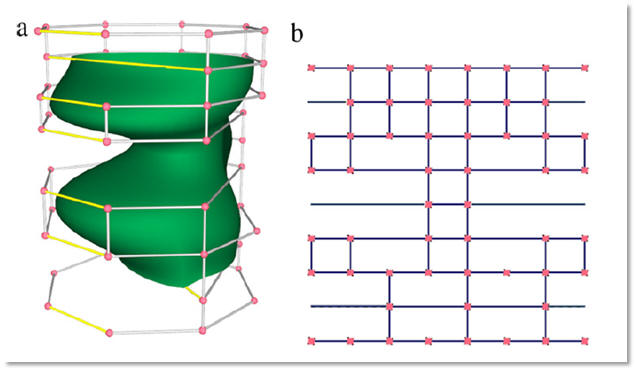
A ball B-spline
curve (BBSC) is a skeleton based solid model representation, which consists of a
B-spline curve and a B-spline function serving as the (varying) radius of a ball
moving along the B-spline curve. The surface shape specified by the BBSC is the
envelope of the moving ball and thus the BBSC is very suitable for representing
vascular shapes. To apply this good representation in various fields as CSG-to-boundary
conversion, Boolean operations, geometric design, pattern recognition,
scientific visualization, this paper proposes an efficient algorithm to solve
their common fundamental intersection problem. The surface of each BBSC is
decomposed into a starting spherical patch, a set of lateral surfaces defined by
ball Bézier curves (BBC), and an ending spherical patch. The intersection
algorithm proceeds in four steps: (1) tessellating both BBSCs into triangular
meshes and computing the intersection curves between the triangular meshes,
which serve as the initial intersections for later refinement; (2)
parameterizing the surfaces/patches of one BBSC and implicitizing the
surfaces/patches of the other BBSC; (3) calculating the intersection curves
between a parametric surface and an implicit surface numerically by using the
Newton’s method; and (4) tracing the intersection curves for the construction of
intersection solid regions. In particular, we present simple methods for
parameterization and implicitization of BBSCs, which are the core of the
proposed algorithm. And BBSC is a solid model, therefore the intersection of
BBSCs is the intersection of solid models, and the final intersection result is
also a solid object. Experimental results show that our method is able to
efficiently find the intersections of BBSCs with high accuracy.
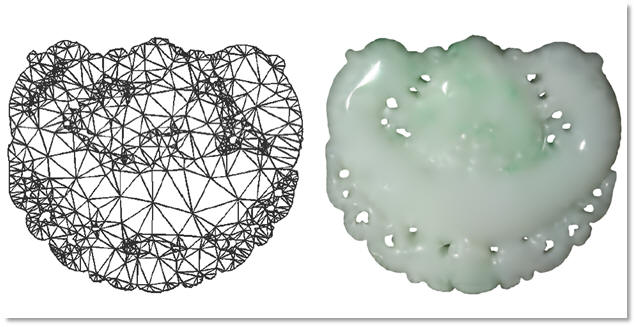
Presence: Teleoperators and Virtual
Environments 26(4): 378-388, 2018.
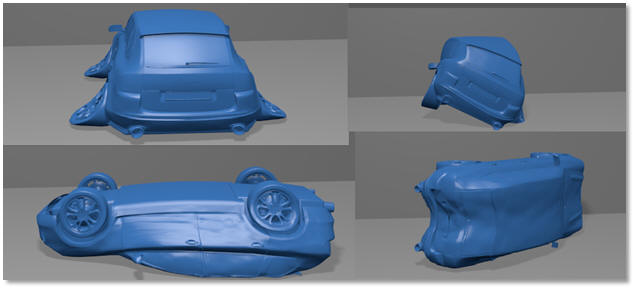
This paper
describes a project on the use of Virtual Reality Continuum (VRC) for
applications in culture and heritage. Haw Par Villa, a local heritage site in
Singapore, is selected to demonstrate the entire process of VRC-enhanced
digitization from laser scanning to 3D mapping and to 3D prototyping, using
Madam Snake White as an example. The objective of the research is to investigate
an effective and integrated solution to developing VRC applications for culture
and heritage. Efforts are made for fidelity in the 3D modeling of the existing
heritage for multiple applications, with the aim to popularize them in a simple
and effective manner. In particular, in the case of Madam Snake White, we
investigate the feasibility and effectiveness of digitization, 3D mapping, and
3D printing. We also discuss the use of online and interactive Madam Snake White
as VRC heritage. A small group of volunteers were invited to a trial and their
feedback was positive. Future work includes the application of VRC-enabled
heritage for humanities education in local schools.
J. Zhang, J. Zheng, N.Magnenat
Thalmann (2018)
"MCAEM: mixed-correlation analysis-based episodic memory for companion–user
interactions"
The Visual Computer 34(6-8):
1129-1141, 2018.
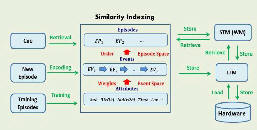
This paper
considers episodic memory for companion–human interaction, aiming at improving
user experience of interactions by endowing social companions with awareness of
past experience. Due to noise and incomplete cues from natural language and
speech in real-world interaction, accurate memory retrieval is very challenging
and the noise resistance is important in practice. To improve the robustness of
companion–human interaction, we propose a mixed-correlation analysis-based
episodic memory (MCAEM) model, in which the correlations between memory elements
are analyzed and then utilized for memory retrieval. In particular, the
correlations are analyzed in three aspects: the relations between elements,
importance of attributes and order of events. Based on the mixed-correlation
analysis, a new similarity measure is constructed, which has substantially
enhanced the noise resistance of memory retrieval. Experiments on a dataset
collected from interaction in movies quantitatively evaluate the MCAEM model and
compare it with prior work. Also, a user study is conducted to investigate the
benefits of integrating the MCAEM model into social companions. The results
demonstrate that the companions equipped with the MCAEM model not only have
better retrieval performance, but also improve user experience in many aspects.
Computer-Aided Design and
Applications, Vol.14. No.4, pp.498-506.
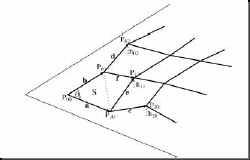
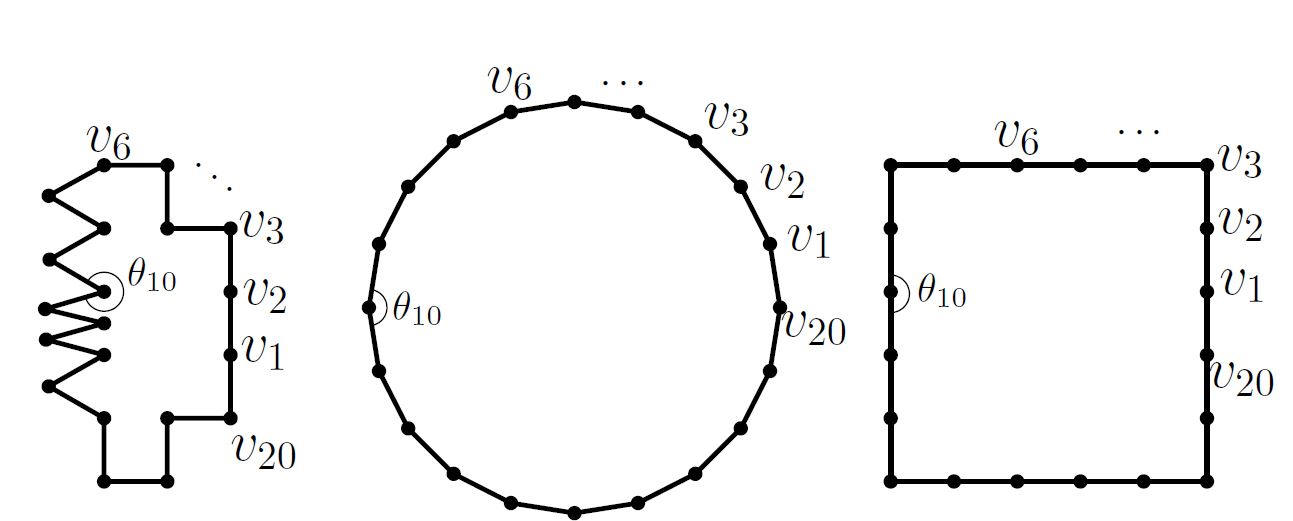
This paper
presents a novel scheme for constructing bivariate spline surfaces over
triangular meshes which are topologically equivalent to a disk. The core
part of the scheme is a set of knot selection rules that define local
configurations of a triangulation called the directed-one-ring-cycle (D1RC)
configurations and bivariate splines defined over a D1RC configuration that
are new non-tensor-product splines and possess many nice properties of a
univariate B-spline. Using D1RC splines, we take an input triangular mesh as
a control mesh and define a bivariate spline surface from the control mesh,
which mimics the standard NURBS modeling. Moreover, we can introduce sharp
features into the overall smooth spline surface by simply setting special
D1RC configurations. As a result, the proposed scheme can define spline
surfaces in a way similar to that of NURBS, but has less restriction on the
connectivity of the input control mesh.
L.
Tian, N.Magnenat
Thalmann, D.Thalmann, J. Zheng (2017)
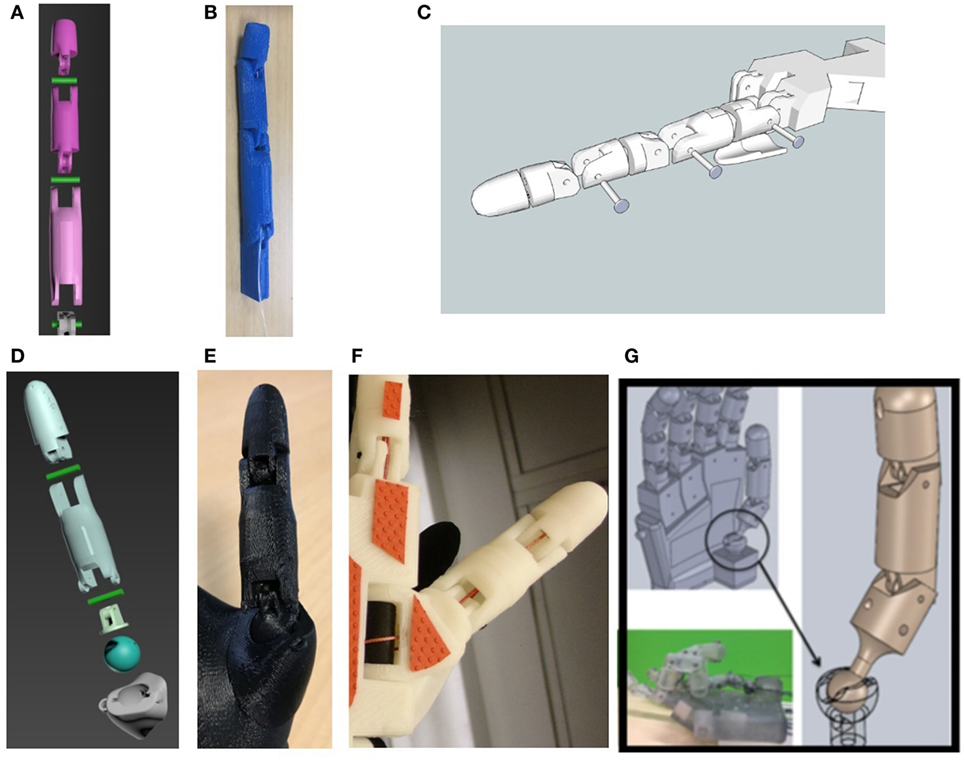
"The making of a 3D-printed, cable-driven, single-model, lightweight humanoid
robotic hand"
Frontiers in Robotics and AI
4, 2017.
Dexterity robotic
hands can greatly enhance the functionality of humanoid robots, but the making
of such hands with not only human-like appearance but also the capability of
performing the natural movement of social robots is a challenging problem. The
first challenge is to create the hand’s articulated structure and the second
challenge is to actuate it to move like a human hand. A robotic hand for
humanoid robot should look and behave human like. At the same time, it also
needs to be light and cheap for widely used purposes. We start with studying the
biomechanical features of a human hand and propose a simplified mechanical model
of robotic hands, which can achieve the important local motions of the hand.
Then, we use 3D modeling techniques to create a single interlocked hand model
that integrates pin and ball joints to our hand model. Compared to other robotic
hands, our design saves the time required for assembling and adjusting, which
makes our robotic hand ready-to-use right after the 3D printing is completed.
Finally, the actuation of the hand is realized by cables and motors. Based on
this approach, we have designed a cost-effective, 3D printable, compact, and
lightweight robotic hand. Our robotic hand weighs 150 g, has 15 joints, which
are similar to a real human hand, and 6 Degree of Freedom (DOFs). It is actuated
by only six small size actuators. The wrist connecting part is also integrated
into the hand model and could be customized for different robots such as Nadine
robot. The compact servo bed can be hidden inside the Nadine robot’s sleeve and
the whole robotic hand platform will not cause extra load to her arm as the
total weight is almost the same as her previous unarticulated robotic hand which
is 348 g. The paper also shows our test results with and without silicon
artificial hand skin, and on Nadine robot.
X.Wu, J. Zheng, Y.Cai, H.Li (2017)
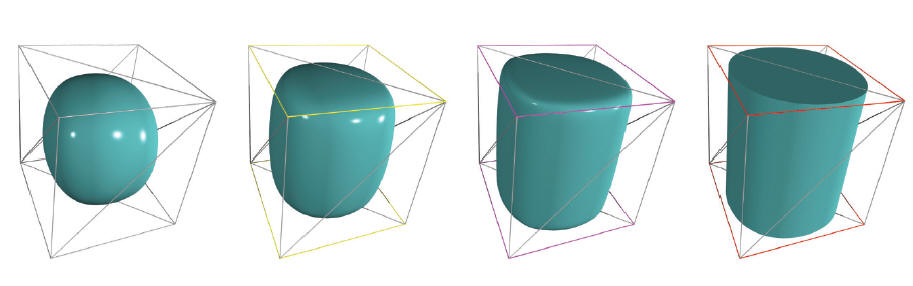
"Variational reconstruction using subdivision surfaces with continuous sharpness
control"
Computational Visual Media
3(3): 217-228, 2017.
We present a
variational method for subdivision surface reconstruction from a noisy dense
mesh. A new set of subdivision rules with continuous sharpness control is
introduced into Loop subdivision for better modeling subdivision surface
features such as semi-sharp creases, creases, and corners. The key idea is to
assign a sharpness value to each edge of the control mesh to continuously
control the surface features. Based on the new subdivision rules, a variational
model with L1 norm is formulated to find the control mesh and the corresponding
sharpness values of the subdivision surface that best fits the input mesh. An
iterative solver based on the augmented Lagrangian method and particle swarm
optimization is used to solve the resulting non-linear, non-differentiable
optimization problem. Our experimental results show that our method can handle
meshes well with sharp/semi-sharp features and noise.
T.Deng, J.Cai, T.J.Cham, J. Zheng
(2017)
"Multiple consumer-grade depth camera
registration using everyday objects"
Image and Vision Computing 62:
1-7, 2017.
The registration
of multiple consumer-grade depth sensors is a challenging task due to noisy and
systematic distortions in depth measurements. Most of the existing works heavily
rely on large number of checkerboard observations for calibration and
registration of multiple depth cameras, which is tedious and not flexible. In
this paper, we propose a more practical method for conducting and maintaining
registration of multi-depth sensors, via replacing checkerboards with everyday
objects found in the scene, such as regular furniture. Particularly, high
quality pre-scanned 3D shapes of standard furniture are used as calibration
targets. We propose a unified framework that jointly computes the optimal
extrinsic calibration and depth correction parameters. Experimental results show
that our proposed method significantly outperforms state-of-the-art depth camera
registration methods.
Heavy lifting is
a common and important task in industrial plants. It is conducted frequently
during the time of plant construction, maintenance shutdown and new equipment
installation. To find a safe and cost effective way of lifting, a team works for
weeks or even months doing site investigation, planning and evaluations. This
paper considers the lifting path planning problem for terrain cranes in complex
environments. The lifting path planning problem takes inputs such as the plant
environment, crane mechanical data, crane position, start and end lifting
configurations to generate the optimal lifting path by evaluating costs and
safety risks. We formulate the crane lifting path planning as a multi-objective
nonlinear integer optimization problem with implicit constraints. It aims to
optimize the energy cost, time cost and human operation conformity of the
lifting path under constraints of collision avoidance and operational
limitations. To solve the optimization problem, we design a Master–Slave
Parallel Genetic Algorithm and implement the algorithm on Graphics Processing
Units using CUDA programming. In order to handle complex plants, we propose a
collision detection strategy using hybrid configuration spaces based on an
image-based collision detection algorithm. The results show that the method can
efficiently generate high quality lifting paths in complex environments.
X.Wu, J. Zheng, Y.Cai, C.W.Fu (2015)
"Mesh denoising using extended ROF model with L1 fidelity"
Computer Graphics Forum 34(7):
35-45, 2015.
This paper
presents a variational algorithm for feature‐preserved mesh denoising. At the
heart of the algorithm is a novel variational model composed of three
components: fidelity, regularization and fairness, which are specifically
designed to have their intuitive roles. In particular, the fidelity is
formulated as an L1 data term, which makes the regularization
process be less dependent on the exact value of outliers and noise. The
regularization is formulated as the total absolute edge‐lengthed supplementary
angle of the dihedral angle, making the model capable of reconstructing meshes
with sharp features. In addition, an augmented Lagrange method is provided to
efficiently solve the proposed variational model. Compared to the prior art, the
new algorithm has crucial advantages in handling large scale noise, noise along
random directions, and different kinds of noise, including random impulsive
noise, even in the presence of sharp features. Both visual and quantitative
evaluation demonstrates the superiority of the new algorithm.
J. Zhang, J. Zheng, N.Magnenat
Thalmann (2015)
"PCMD: personalized-characterized mood dynamics model twoard personalized
virtual characters"
Journal of Visualization and
Computer Animation 26(3-4): 237-245, 2015.
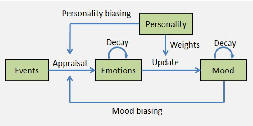
How to endow the
virtual characters with personalized behavior patterns remains a challenging
problem. Instead of heuristically designing behaviors for certain personalities,
this paper bridges the gap between personalities and behaviors using a medium
concept, mood, to make the behaviors of the characters consistent enough to
convey their personalities, while flexible enough to make appropriate response
in various situations. We propose a personality‐characterized mood dynamics
model, in which the emotion weights are computed as a solution of a convex
optimization problem that is constructed to make the overall mood approaches the
personality after sufficient interactions. The convergence of the algorithm is
demonstrated by numerical simulations. The implementation of the personality
characterized mood dynamics model enables an emotion‐oriented virtual human,
Sophie, to show personalized behaviors in the emotional interactions with users.
W.Zhang, J. Zheng, N.Magnenat
Thalmann (2015)
"Real-time subspace integration for example-based elastic material"
Computer Graphics Forum (EUROGRAPHICS
2015), Vol.34, No.2.
Example-based material allows simulating complex material
behaviors in an art-directed way. This paper presents a method for fast subspace
integration for example-based elastic material, which is suitable for real-time
simulation in computer graphics. At the core of the method is the formulation of
a new potential using example-based Green strain tensors. By using this
potential, the deformation can be attracted towards the example-based
deformation feature space, the example weights can be explicitly obtained and
the internal force can be decomposed into the conventional one and an additional
one induced by the examples. The real-time subspace integration is then
developed with subspace integration costs independent of geometric complexity,
and both the reduced conventional internal force and additional one being cubic
polynomials in reduced coordinates. Experiments demonstrate that our method can
achieve real-time simulation while providing comparable quality with the prior
art.
ACM Transactions on Intelligent
Systems and Technology, Vol.6, No.2, 2015.
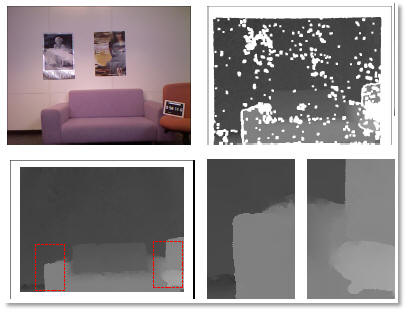
Considering the existing depth recovery approaches have different limitations
when applying to Kinect depth data, in this paper, we propose to integrate their
effective features including adaptive support region selection, reliable depth
selection and color guidance together under an optimization framework for Kinect
depth recovery. In particular, we formulate our depth recovery as an energy
minimization problem, which solves the depth hole-filling and denoising
simultaneously. The energy function consists of a fidelity term and a
regularization term, which are designed according to the Kinect characteristics.
Our framework inherits and improves the idea of guided filtering by
incorporating structure information and prior knowledge of Kinect noise model.
Through analysing the solution to the optimization framework, we also derive a
local filtering version which provides an efficient and effective way of
improving the existing filtering techniques.
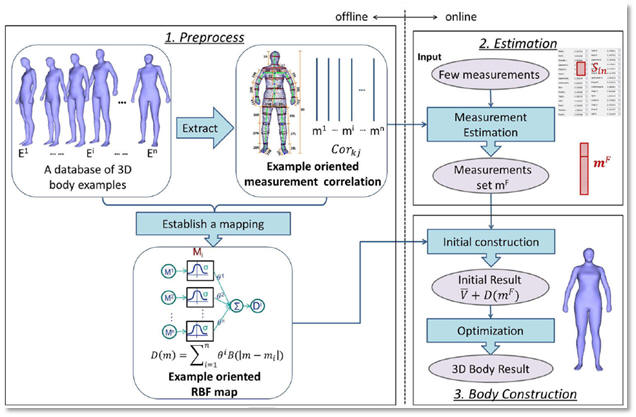
This paper presents an example-guided, anthropometry-based
modeling method for creating 3D human body models from users’ input of partial
anthropometric measurements with a given example dataset. Rather than directly
forming a mapping between the partial measurements and the body model, we
first estimate a set of chosen 30 measurements from the input based on the
example-oriented measurement analysis. We then create an initial 3D model using
the example-oriented radial basis function model that maps the set of 30
measurements to the body shape space and is established based on the given
examples. We finally refine the 3D model by constrained optimization to create
the target body model. Our method has several advantages: (1) the created model
is guaranteed to match the input measurements and reflects the shape
characteristics of examples; (2) the input requirement is modest, which makes it
useful in practice; and (3) the information of both the measurements and
examples is fully utilized. We demonstrate the effectiveness, accuracy,
flexibility and extensibility of the method by various experimental evaluations
and a Kinect-based body customization application.
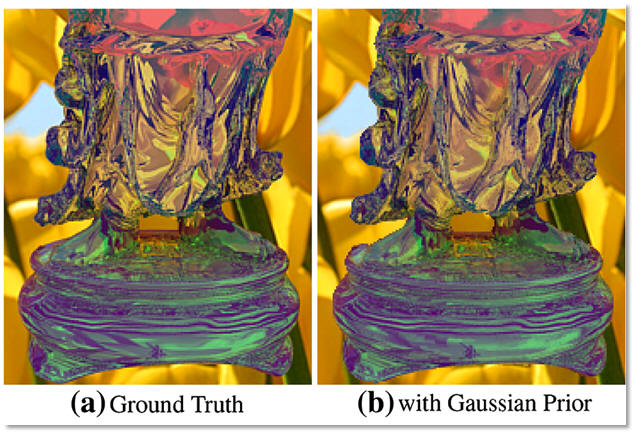
The existing high-quality environment matting methods usually
require the capturing of a few thousand sample images and spend a few hours in
data acquisition. In this paper, a novel environment matting algorithm is
proposed to capture and extract the environment matte data effectively and
efficiently. First, the recently developed compressive sensing theory is
incorporated to reformulate the environment matting problem and simplify the
data acquisition process. Next, taking into account the special properties of
light refraction and reflection effects of transparent objects, two advanced
priors, group clustering and Gaussian priors, as well as other basic constraints
are introduced during the matte data recovery process to combat with the limited
image samples, suppress the effects of the measurement noise resulted from data
acquisition, and faithfully recover the sparse environment matte data. Compared
with most of the existing environment matting methods, our algorithm
significantly simplifies and accelerates the environment matting extraction
process while still achieving high-accurate composition results.
D.Xu, Q.Duan, J. Zheng,
J.Zhang, J. Cai, T.Cham (2014)
Reconstructing
the shape of a 3D object from multi-view images under unknown, general
illumination is a fundamental problem in computer vision and high quality
reconstruction is usually challenging especially when high detail is needed.
This paper presents a total variation (TV) based approach for recovering surface
details using shading and multi-view stereo (MVS). Behind the approach are our
two important observations: (1) the illumination over the surface of
an object tends to be piecewise smooth and (2) the recovery of surface
orientation is not sufficient for reconstructing geometry, which were previously
overlooked. Thus we introduce TV to regularize the lighting and use visual hull
to constrain partial vertices. The reconstruction is formulated as a constrained
TV minimization problem that treats the shape and lighting as unknowns
simultaneously. An augmented Lagrangian method is proposed to quickly solve the
TV-minimization problem. As a result, our approach is robust, stable and is able
to efficiently recover high quality of surface details even starting with a
coarse MVS. These advantages are demonstrated by the experiments with synthetic
and real world examples.
Journal of Computational and
Applied Mathematics, Vol.273. pp.116-131, Jan 2015.
NURBS skinning is
a powerful and effective process in Computer Aided Geometric Design. It
constructs a surface by interpolating a set of cross sectional NURBS curves.
These curves however may not be compatible, i.e., they have different knot
vectors. This incompatibility is conventionally solved by knot refinement
bringing all curves to share the same knot vector, which leads to an explosion
in the number of control points defining the skinned surface. Another
disadvantage of NURBS skinning is the difficulty of local modification:
adjusting one cross section may result in a global change of the surface. In
this paper, we present a method for surface skinning using periodic
T-splines,
which is able to handle closed cross sections, support local modifications and
control smoothness along the cross sectional curves. We provide explicit
formulae for constructing such T-spline
skinned surfaces, which avoid solving a large system of equations. Experimental
results and theoretical analysis confirm that our approach is better than NURBS
skinning as it generates surfaces with fewer control points.
P.Song, C.W.Fu, P.Goswami, J. Zheng, N.Mitra, D.Cohen-Or (2014)
This paper presents
the detail of our interactive tool for designing reciprocal frame (RF)
structures. In general, our tool addresses the RF design problem with three
major steps: (1) it supports the design of RF-tessellation by connecting RF
patterns and plane tiling; (2) it delivers interactive preview and exploration
of RF designs in 3D space through conformal mapping; and (3) it performs a novel
optimization method to arrange the rods in the RF-structures, so that we can
ensure rod collinear contacts in the structures. This paper supplements our
previous work with implementation details, user interface design and operations,
as well as a preliminary study and various new results we devised from the tool.
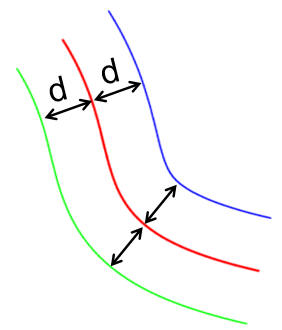
Engineering with Computers,
Vol.30, No.4, pp.583-597.
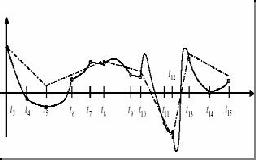
This paper presents formulae for evaluating
differential quantities at vertices of triangular meshes that may approximate
potential piecewise smooth surfaces with discontinuous normals or discontinuous
curvatures at the joint lines. We also define the C1
and C2 discontinuity
measures for surface meshes using changing rates of one-sided curvatures or
changing rates of curvatures across mesh edges. The curvatures are computed
discretely as of local interpolating surfaces that lie within a tolerance to the
mesh. Together with proper estimation of local shape parameters, the obtained
discontinuity measures own properties like sensitivity to salient joint lines
and being scale invariant. A simple algorithm is finally developed for detection
of C1 or
C2 discontinuity
joint lines on triangular meshes with even highly non-uniform triangulations.
Several examples are provided to demonstrate the effectiveness of the proposed
method.
Journal of Visual Communication
and Image Representation, Vol.24, No.4, pp 477-485.
This paper
presents a non-trivial solution to the following problem: given a set of
calibrated or un-calibrated multi-view images, by interactively cutting 3 to 4
images, can the foreground object of the rest images be quickly cutout
automatically and accurately? Our idea is to integrate 3D segmentation with 2D
segmentation so as to combine their advantages. Our proposed system iteratively
performs 2D and 3D segmentation, where the 3D segmentation results are used to
initialize 2D segmentation and ensure the silhouette consistency among different
views and the 2D segmentation results are used to provide more accurate cues for
the 3D segmentation. The experimental results show that the proposed system is
able to generate highly accurate segmentation results, even for some challenging
real-world multi-view image sequences, with a small amount of user input.
The problem of segmenting a foreground object out
from its complex background is of great interest in image processing and
computer vision. Many interactive segmentation algorithms such as graph cut have
been successfully developed. In this paper, we present four technical components
to improve graph cut based algorithms, which are combining both color and
texture information for graph cut, including structure tensors in the graph cut
model, incorporating active contours into the segmentation process, and using a
"softbrush" tool to impose soft constraints to refine problematic boundaries.
The integration of these components provides an interactive segmentation method
that overcomes the difficulties of previous segmentation algorithms in handling
images containing textures or low contrast boundaries and producing a smooth and
accurate segmentation boundary. Experiments on various images from the Brodatz,
Berkeley and MSRC data sets are conducted and the experimental results
demonstrate the high effectiveness of the proposed method to a wide range of
images.
This paper considers the problem of decomposing an
image defined on a manifold into a structural component and a textural
component. We formulate such decomposition as a variational problem, in which
the total variation energy is used for extracting the structural part and based
on the properties of texture one of three norms, L2, L1
and G, is used in the fidelity term for the textural part. We develop
efficient numerical methods to solve the proposed variational problems using
augmented Lagrangian methods (ALM) when the manifold is represented by a
triangular mesh. The contributions of the paper are two-fold: (1) We adapt the
variational structure–texture image decomposition to manifolds, which takes the
intrinsic property of manifolds into account. The non-quadratic fidelity terms
with L1 and G norms are extended to 3D triangular
meshes for the first time. (2) We show how to efficiently tackle the variational
problems with non-linearity/non-differentiability terms by iteratively solving
some sub-problems that either have closed form solutions or are to solve linear
equations.
Journal of Computational and
Applied Mathematics, Vol.244. pp.36-48, May 2013.
This paper presents a new curve subdivision
algorithm called interproximate subdivision for generating curves that
interpolate some given vertices and approximate the other vertices. By the
interproximate subdivision, only the vertices specified to be interpolated are
fixed and the other vertices are updated at each refinement step. The refinement
rules are derived to ensure that the eigenvalues of the refinement matrix
satisfy the necessary condition of
C2
continuity. The interproximate subdivision also contains tension parameters
assigned to vertices or edges for shape adjustment. Compared to the 4-point
interpolatory subdivision scheme, the interproximate subdivision does not force
the new inserted vertices to be interpolated and is thus expected to have
improved behavior; and compared to the cubic
B-spline
refinement scheme, the interproximate subdivision is able to generate curves
interpolating user-specified vertices. In addition, the paper also presents two
extensions of the interproximate subdivision: one automatically adapts the
tension parameters locally according to the geometry of the control polygon
during the refinement to achieve convexity preservation and the other
automatically relaxes the interpolating property of some vertices to achieve
better shape behavior.
Magnetic Resonance in Medicine 69:
1297-1309, 2013.
A novel B-Spline
based approach to phase unwrapping in tagged magnetic resonance images is
proposed for cardiac motion tracking. A bicubic B-spline is used to model the
absolute phase. The phase unwrapping problem is formulated as a mixed integer
optimization problem that minimizes the sum of the difference between the
spatial gradients of absolute and wrapped phases, and the difference between the
rewrapped and wrapped phases. In contrast to the existing techniques for motion
tracking, the proposed approach can overcome the limitation of interframe
half-tag displacement and increase the robustness of motion tracking. The paper
further presents a hybrid harmonic phase imaging-B-spline method to take the
advantage of the harmonic phase imaging method for small motion and the
efficiency of the B-Spline approach for large motion. The proposed approach has
been successively applied to a full set of cardiac MRI scans in both long and
short axis slices with superior performance when compared with the harmonic
phase imaging and quality guided path-following methods.
P. Chiang, J. Zheng, Y.Yu, K. Mak,
C.Chui, Y.Cai (2013)
IEEE Computer Graphics and
Applications,
Vol.33, No.1, pp 44-57, 2013.
The process of
learning diagnosis and minimally invasive treatment of heart diseases takes
substantial time due to the complex nature of the diseases and the high skill
set required to manipulate surgical devices, especially in percutanous
intra-cardiac cases. We are interested to develop a novel simulator to create a
realistic and low-cost training environment for intra-cardiac intervention. This
paper focuses on the concept, design and implementation of a Virtual Reality (VR)
simulator for intra-cardiac intervention. Instead of using traditional Finite
Element Method (FEM), a new geometrical-based method is proposed to model the
interaction between an intra-cardiac catheter and the heart wall. A
boundary-enhanced voxelization technique is developed to accelerate the process
for detecting catheter-heart interactions. A tactile interface is designed
incorporating a VR catheter unit to track the catheter movement within the
virtual heart. A progressive approach is implemented to reconstruct the heart
chamber for the application of heart mapping.
Independent
interpolation of local surface patches and local normal patches is an efficient
way for fast rendering of smooth curved surfaces from rough polyhedral meshes.
In this paper, we present two schemes based on the Gregory normal patch or the
side-vertex interpolating normal for normal interpolation along with cubic
Bezier triangles for rendering curved surfaces from rough triangular meshes.
Compared to the previous quadratic normal interpolation method, the proposed two
methods can generally produce more realistic shading results for rendering rough
triangular meshes.
This paper introduces a special arc spline called an Euler arc
spline as the basic form for visually pleasing completion curves. It is
considered as an extension of an Euler curve in the sense that the points in the
Euler curve are replaced by arcs. A simple way for specifying it, which is
suitable for shape completion, is presented. It is shown that Euler arc splines
have several properties desired by aesthetics of curves, in addition to
computational simplicity and NURBS representation. An algorithm is proposed for
curve completion using Euler arc splines. The development of the algorithm
involves two optimization processes, which are converted into a single
minimization problem in two variables solved by the Levenberg-Marquardt
algorithm. Compared to previous methods, the proposed algorithm always
guarantees the interpolation of two boundary conditions.
The Visual Computer, Vol. 28.,
No.6-8, pp 787-797.
Skinning is a
process of generating a surface from a set of given curves. In the interpolating
approach, the incompatibility of the input NURBS curves are solved by knot
insertion, which often leads to an explosion in the number of control points
defining the skinned surface. In this paper, we present a solution to this
problem using T-splines. Compared to existing approaches, a T-spline skinned
surface interpolates a set of incompatible curves with a control mesh of fewer
vertices. Moreover, our approach is a local construction.
International Journal of Virtual
Reality, Vol. 11.,
No.1, pp 15-24.
Less control
points are needed to represent a shape in T-Splines compared to NURBS and
subsequently less time is spent in modeling. While getting more and more
accepted by commercial software, T-splines, however, are yet part of VRML/X3D.
The T-spline VRML is proposed in this work. An effective data structure is
designed for T-splines to support online visualization. Compared to the NURBS
and the polygonal representations, the proposed T-spline data structure
representation can significantly reduce the VRML file size which is a central
concern in online applications. As such, complex objects modeled in T-spline
form have better chances for real-time transfer from servers to clients. Similar
to other VRML nodes, T-spline VRML node can support geometry, color and texture.
Users can interact with T-spline more effectively for LOD and animation
applications.
In digital image editing, environment matting and compositing are
fundamental and interesting operations that can capture and simulate the
refraction and reflection effects of light from an environment. The
state-of-the-art real-time environment matting and compositing method is short
of flexibility, in the sense that it has to repeat the entire complex matte
acquisition process if the distance between the object and the background is
different from that in the acquisition stage, and also lacks accuracy, in the
sense that it can only remove noises but not errors. In this paper, we introduce
the concept of refractive vector and propose to use a refractive vector field as
a new representation for environment matte. Such refractive vector field
provides great flexibility for transparent-object environment matting and
compositing. Particularly, with only one process of the matte acquisition and
the refractive vector field extraction, we are able to composite the transparent
object into an arbitrary background at any distance. Furthermore, we introduce a
piecewise vector field fitting algorithm to simultaneously remove both noises
and errors contained in the extracted matte data. Experimental results show that
our method is less sensitive to artifacts and can generate perceptually good
composition results for more general scenarios.
Journal of Computational and
Applied Mathematics, Vol.235. No.17, pp.5001-5016.
This paper considers the problem of computing the Bezier
representation for a triangular sub-patch on a triangular Bezier surface. The
triangular sub-patch is defined as a composition of the triangular surface and a
domain surface that is also a triangular Bezier patch. Based on de Casteljau
recursions and shifting operators, previous methods express the control points
of the triangular sub-patch as linear combinations of the construction points
that are constructed from the control points of the triangular Bezier surface.
The construction points contain too many redundancies. This paper derives a
simple explicit formula that computes the composite triangular sub-patch in
terms of the blossoming points that correspond to distinct construction points
and then an efficient algorithm is presented to calculate the control points of
the sub-patch.
P.Chiang, Y.Cai, K.Mak, E.Soe, C.
Chui, J. Zheng (2011)
Cardiac intervention is a minimally invasive diagnostic and
therapeutic procedure used to treat cardiac diseases. The mapping of heart
geometry with minimal visual assistance presents a technical challenge for
interventional cardiologists attempting catheter navigation. This paper presents
a geometric approach to modeling the catheter-heart interaction for VR
simulations of catheter navigation within a heart chamber. Three types of
modeling are used to model the interaction between the catheter and the heart
wall: non-slip, pseudo-slip and slip modeling. A two-step shape memory process
that minimizes the bending of and strain on the catheter is designed for
catheter deformation for non-slip or pseudo-slip contact, and a progressive
group linkage bending process that constrains the catheter curvature and
position within the volume enclosure is designed for catheter deformation for
slip contact. The proposed model is consistent with the observations made during
the experiment. The model is able to deform the catheter in any free-state shape
within the volume enclosure and is independent of local motion increment. Thus,
it presents advantages in terms of complexity and real-time requirements.
Seeded image
segmentation is a popular type of supervised image segmentation in computer
vision and image processing. Previous methods of seeded image segmentation treat
the image as a weighted graph and minimize an energy function on the graph to
produce a segmentation. In this paper, we propose to conduct the seeded image
segmentation according to the result of a heat diffusion process in which the
seeded pixels are considered to be the heat sources and the heat diffuses on the
image starting from the sources. After the diffusion reaches a stable state, the
image is segmented based on the pixel temperatures. To better control diffusion,
we propose to incorporate the attributes of the image into the diffusion
process, yielding an anisotropic diffusion method for image segmentation.
This paper discusses a special type of T-spline surfaces called
periodic T-splines that are closed in one parameter direction, and their
application in tubular surface fitting. First, a global representation is
proposed for representing periodic T-splines. This representation does not
require repeating control points, which facilitates surface fitting process.
Then, an algorithm for adaptively fitting periodic T-splines to a tubular
triangular mesh that has the same topology as a cylinder is presented. The
resulting periodic T-spline is obtained respecting the geometric distribution of
the input mesh. The use of periodic T-splines for tubular surface fitting has at
least two advantages: 1) adaptive fitting is easily achieved due to the local
refinement of T-splines; 2) the algorithm avoids cutting the mesh to make it a
disk topologically for conventional B-spline fitting due to the periodic
representation and this overcomes the drawback of finding a good cutting path,
which is usually difficult.
Computer Graphics Forum
(Eurographics'2010), Vol.29, No.2, pp 517-526.
This paper
considers the problem of interactively finding the cutting contour to
extract components from a given mesh. A geodesic curvature flow based
framework is proposed to solve this problem. Since in many cases the
meaningful cutting contour on a 3D mesh is locally shortest in the sense of
some weighted curve length, the geodesic curvature flow is an ideal tool for
our problem. It evolves the cutting contour to the nearby local minimum. We
should mention that the previous numerical scheme, discretized geodesic
curvature flow (dGCF) is too slow and has not been applied to mesh
segmentation. With a careful observation to dGCF, we devise here a fast
computation scheme called fast geodesic curvature flow (FGCF), which only
needs to solve a smaller and easier problem. The initial cutting contour is
generated by a variant of random walks algorithm, which is very fast and
gives reasonable cutting result with little user input. Experiment results
on the benchmark mesh segmentation data set show that our proposed framework
is robust to user input and capable of producing good results reflecting
geometric features and human shape perception.
In this paper,
Monge mapping technique is developed for detail and local shape modification of
NURBS represented geometry in 3D environment. Based on multi-resolution and
refinement schemes, hierarchical NURBS (H-NURBS) is investigated to design a
mechanism for the purpose of carrying localized geometric information. Monge
mapping on H-NURBS patch can be easily performed via simple cut&paster
operation. Parametric control of the local shapes is developed to facilitate
easier and better 3D local modeling.
Algebraic curve fitting based on algebraic distance is simple,
but it has a disadvantage of inclining to a trivial solution. Researchers
therefore introduce some constraints into the objective function in order to
avoid the trivial solution. However, this often causes additional branches.
Fitting based on geometric distance can avoid additional branches, but it does
not offer sufficient fitting precision. In this paper we present a new algebraic
B-spline curve fitting method which combines both geometric distance and
algebraic distance. The method first generates an initial curve by a distance
field fitting that takes geometric distance as the objective function. Then
local topology-preserving calibrations based on algebraic distance are performed
so that each calibration doesn't produce any additional branches. In this way,
we obtain an additional branch free fitting result whose precision is close to
or even better than that produced by purely algebraic distance based methods.
Computer Modeling in Engineering &
Sciences, Vol. 68, No.3, pp.221-237.
A protein model
(such as a ribbon model) can be created from the atomic coordinates in the
protein data base files. These coordinates are obtained by X-ray crystallography
or NMR spectroscopy with the protein arbitrarily oriented. As such, identifying
or comparing a novel structure with a known item using protein model in the
protein data base can be a timely process since a large number of
transformations may be involved. The identification efficiency will be improved
if the protein models are uniformly oriented. This paper presents an approach to
orient a protein model to generate the characteristic views with minimum and
maximum crossings respectively. The projection directions for these
characteristic views are determined by a set of crossing maps (C-maps).
Re-orientating the protein models in the protein data base to two characteristic
views will facilitate the process of identification.
Journal of Visualization and
Computer Animation, Vol 21, No.2, pp 91-102.
Triangular
meshes are a popular geometric representation for 3D models used in computer
graphics. Parameterization is a process that establishes a mapping between
the surface of a model and a suitable domain. This paper considers the
problem of parameterizing triangular meshes that have tubular shapes. Unlike
an open mesh that is of plane topological type, a tubular mesh gives rise to
some special issues in parameterization due to its mesh structure. This
paper presents an edge-based parameterization method, in which the edges
rather than the vertices of the mesh are treated as the target for
parameterization. It first parameterizes the edges on the two boundaries of
the tubular mesh, then parameterizes the internal edges based on the mean
value coordinates, and finally computes the parameters of the mesh vertices.
The method does not need cutting of the mesh. It improves conventional
cutting-based algorithms, which cut the mesh to make it a disk
topologically, and overcomes the problems of cutting paths that are the
zigzag paths leading to suboptimal parameterizations and the difficulty in
finding good cutting paths. Some applications such as surface fitting and
texture mapping are also provided.
This paper is concerned with the
re-representation of a G1 composite rational Bezier curve.
Although the rational Bezier curve segments that form the composite curve
are G^1 continuous at their joint points, their homogeneous representations
may not be even C0 continuous in the homogeneous space. In this
paper, an algorithm is presented to convert the G1 composite
rational Bezier curve into a NURBS curve whose nonrational homogeneous
representation is C1 continuous in the homogeneous space. This
re-representation process involves reparameterization using Moebius
transformations, smoothing multiplication and parameter scaling
transformations. While the previous methods may fail in some situations, the
method proposed in this paper always works.
Computer-Aided Design and
Applications, Vol.5. No.1-4, pp.508-518.
This paper is
concerned with the problem of constructing an aesthetically pleasing
triangular mesh with a given closed polygonal contour in three dimensional
space as boundary. Triangular meshes of minimal area from all triangular
meshes with the prescribed boundary are suggested as the candidates for this
problem. An iterative algorithm of constructing such a triangular mesh from
a given polygonal boundary is presented. Experimental examples show that the
proposed algorithm is reliable and effective. Some related theoretical
issues, possible extensions and applications are also discussed.
I. Chandrasekaran, Y. Cai, C.Cao,
B. Lu, J. Zheng
(2007)
Virtual and Physical
Prototyping, Vol.2. No.1, pp.37-49.
Modelling,
sharing and transmission of 3D graphics data of biomolecules are essential in many bio visualization tasks from
collaborative research and education to molecular simulation and drug
discovery. In the current paper, modelling and representing of bio-molecular
structure for virtual and physical rapid prototyping is presented. Our aim
is to devise a uniform solution for visualizing, browsing, interacting and
prototyping of bio-molecules in various environments including internet,
immersive virtual reality (VR), and rapid manufacturing. To do so, we use
non uniform rational B-spline surfaces (NURBS) to represent protein
secondary structure and surface structure. NURBS protein structures are then
tessellated to form bio-molecular graphics models. Their triangular mesh
representation is next extracted from their scene graph. A geometric
optimization process is followed to make data compatible for their
formatting in compact and consistent VR standard to support protein internet
browsing, protein VR visualization, protein 3D rapid prototyping and crystal
sub-surface laser engraving.
Learning
through playing is one of the natural ways for
knowledge and skill acquisition. Games have long been used as a tool for
education, from concept building to problem solving. Through fun learning,
students may further develop their curiosities and interest in their study. This paper addresses the issue of learning biomolecular
structures by Virtual Reality (VR) gaming. A bio edutainment system is developed
for protein structure learning. It consists of mainly three components: visualization, modeling and interaction, on top of various supporting
technologies such as Graphics and Networking. Via virtual reach-in and hands-on,
students can interact with amino acid sequences, protein a-helices, b-sheets and
other protein structural information.
This paper presents
a reliable method for constructing a control mesh whose Doo-Sabin subdivision
surface interpolates the vertices of a given mesh with arbitrary topology. The
method improves on existing techniques in two respects: (1) it is guaranteed to
always work
for meshes of arbitrary topological type; (2) there is no need to solve a system
of linear equations to obtain the control points. Extensions to include normal
vector interpolation and/or shape adjustment are also discussed.
This paper investigates the use of the control points of the
Bernstein- Bezier form for numerically solving differential equations. Two least squares
type schemes based on degree raising and subdivision are proposed. The convergence of the methods applied to two-point boundary value
problems is analyzed.
This paper shows how the Bézier coefficients of a given degree n polynomial
are perturbed, based on minimizing a weighted Euclidean norm, so that it can be reduced to a degree m (<n)
polynomial with the constraint that continuity of a prescribed order is
preserved at the two endpoints. Then the paper proves that the problem of finding a best L2-approximation
over the interval [0,1] for constrained degree reduction is equivalent to that
of finding a minimum perturbation vector in a certain weighted Euclidean norm.
The relevant weights are derived.
J. Zheng, T. Sederberg,
Chionh E.-W., D. Cox (2003)
"Implicitizing rational surfaces
with base points using the method of moving surface"
The method of moving planes and moving quadrics can express the
implicit equation of a parametric surface as the determinant of a matrix M.
The rows of M correspond to moving planes or moving quadrics that follow the
parametric surface. Previous papers on the method of moving surfaces have shown that a simple base point
has the effect of converting one moving quadric to a moving plane. A much more general version of the method of moving surfaces is
presented in this paper that is capable of dealing with multiple base points.
This is a unifying approach whereby tensor product surfaces, pure degree surfaces, and
"corner-cut"
surfaces, can all be implicitized under the same framework and do not need to be treated as distinct cases. The central idea in this
approach is that if a surface has a base point of multiplicity k, the moving surface blending functions must have the same base
point, but of multiplicity k-1.
T. Sederberg, J. Zheng (2002)
"Algebraic methods for computer
aided geometric design"
The concepts and methods of algebra and algebraic geometry have found
significant applications in many disciplines. This chapter presents a collection of
gleanings from algebra or algebraic geometry that
hold practical value for the field of computer aided geometric design. We focus on the insights, algorithm
enhancements and practical capabilities that algebraic methods have contributed to
CAGD. Specifically, we examine resultants and Gröbner basis, and discuss their
applications in implicitization, inversion, parametrization and intersection algorithms. Other topics of CAGD research work using algebraic methods
are also outlined.
Journal of Symbolic Computation,
Vol.31, No.5, pp 619-629.
This paper presents
an O(n2) algorithm, based on Gröbner basis techniques,
to compute the mu-basis of a degree n planar rational curve. The prior method involved
solving a set of linear equations whose complexity by standard numerical methods
was O(n3).
T. Sederberg, J. Zheng, K.
Klimaszewski,
T. Dokken (1999)
Graphical Models and Image
Processing, Vol.61, No.4, pp 177-198.
This paper presents an approach to finding an approximate implicit equation and
an approximate inversion map of a rational parametric curve or surface. High accuracy of the approximation is achieved with a
small number of low-degree curve segments or surface patches. By
using monoid curves and surfaces, the method eliminates the undesirable
singularities and "phantom" branches normally associated with implicit
representation. The monoids are expressed in exact implicit and parametric
equations simultaneously, and upper bounds are derived for the approximate
errors.
Graphical Models and Image
Processing, Vol.59, No.1, pp 19-25.
This
paper provides several methods to
estimate the error bounds for the approximation to the moving control point of
the hybrid curves. When the given rational Bézier curves satisfies the
convergent conditions for moving control point of the hybrid curve, the polynomial Bézier curves
that approximate the rational Bézier curve can
be obtained by replacing the moving control point with the special point.
This paper gives a sufficient and necessary characterization to describe
polynomial/rational curves whose offset can be expressible as rational curves.
In particular, a planar parametric polynomial curve P= P(t) has a rational
offset if and only if there exist a polynomial s(t) and real numbers a, b and c
such that ||P'(t)||2 = s2(t) (at2+bt+c). A
planar rational curve P(t) = Q(t)/W(t) has a rational offset if and only if if
there exist a polynomial s(t) and real numbers a, b and c such that ||Q'(t)W(t)-Q(t)W'(t)||2
= s2(t) (at2+bt+c).