Robotic manipulation
Fine robotic assembly, in which the parts to be assembled are small and fragile and lie in an unstructured environment, is still out of reach of today's industrial robots. The main difficulties arise in the precise localization of the parts in an unstructured environment and the control of contact interactions. We develop a hardware and software architecture to address, in an integrated way, a number of issues arising in fine assembly, such as manipulation planning, workspace optimization, external wrench compensation, position-based force control, etc. Our ultimate goal in this project is to autonomously assemble an IKEA chair.
Selected papers
- F. Suárez-Ruiz, X. Zhou, Q.-C. Pham. Can robots assemble an IKEA chair? Science Robotics, vol. 3, eaat6385, 2018 [Online]
- P. Lertkultanon, Q.-C. Pham. A certified-complete bimanual manipulation planner. IEEE Transactions on Automation Science and Engineering, vol. 15(3), pp. 1355–1368, 2018 [Preprint]
- H. Pham, Q.-C. Pham. Robotic manipulation of a rotating chain. IEEE Transactions on Robotics, vol. 34(1), pp. 139–150, 2018 [Preprint]
Robot motion planning
Motion planning consists in finding a time series of successive joint angles that allows moving a robot from a starting configuration towards a goal configuration, in order to achieve a task, such as grabbing an object from a conveyor belt and placing it on a shelf. This trajectory must respect given constraints: for instance, the robot should not collide with the environment, the joint angles, velocities, accelerations or torques should be within specified limits, etc. Next, if several trajectories are possible, one should choose the one that optimizes a certain objective, such as the trajectory execution time or energy consumption.
We develop algorithms to tackle the most challenging type of constraints, namely kinodynamic constraints: torque limits for manipulators, static friction for non-prehensile object transportation, dynamic balance for humanoid robots, etc. Our research combines theoretical investigations and experiments, and has applications in both industrial and service robotics.
Selected papers
- H. Pham, Q.-C. Pham. A new approach to Time-Optimal Path Parameterization based on Reachability Analysis. IEEE Transactions on Robotics, vol. 34(3), pp. 645–659, 2018 [Preprint]
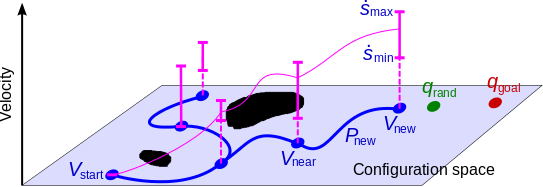
- Q.-C. Pham, S. Caron, P. Lertkultanon, Y. Nakamura. Admissible Velocity Propagation: beyond quasi-static path planning for high-dimensional robots. International Journal of Robotics Research, vol. 36(1), pp. 44–67, 2017 [Preprint]
- Q.-C. Pham, Y. Nakamura. A new trajectory deformation algorithm based on affine transformations. IEEE Transactions on Robotics, vol. 31(4), pp. 1054-1063, 2015 [Preprint]
Humanoid locomotion
We investigate the planning and control algorithms to make humanoid robots locomote in challenging terrains, possibly using multiple contacts. Our research is both theoretical (using tools from optimal control, model-predictive control, polyhedral convex cone, etc.) and experimental: we test our algorithms in simulations and on physical platforms, such as the HRP-2 and HRP-4 humanoid robots.
Selected papers
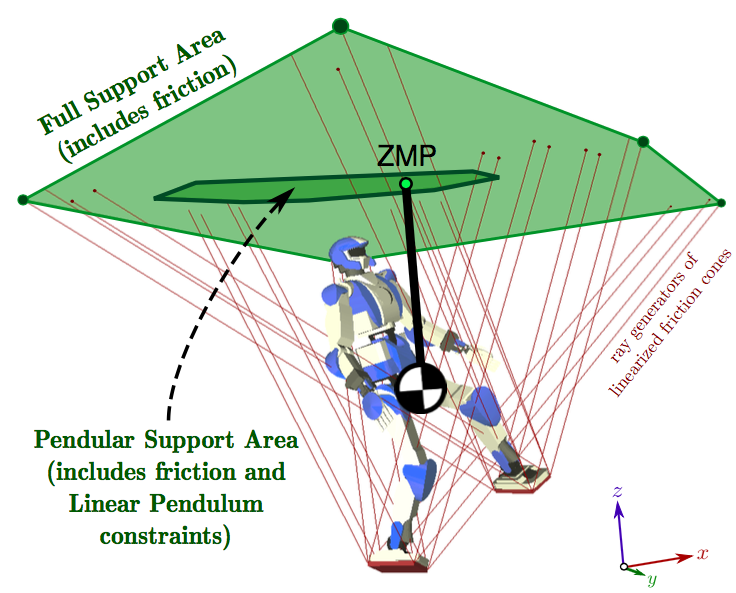
- S. Caron, Q.-C. Pham, Y. Nakamura. ZMP support areas for multi-contact mobility under frictional constraints. IEEE Transactions on Robotics, vol. 33(1), pp. 67–80, 2017 [Preprint]
- S. Caron, Q.-C. Pham, Y. Nakamura. Leveraging cone double description for multi-contact stability of humanoids with applications to statics and dynamics. RSS 2015, Rome, Italy, July 2015 [Online (free)]
- Q.-C. Pham, O. Stasse. Time-optimal path parameterization for redundantly-actuated robots: a numerical integration approach. IEEE/ASME Transactions on Mechatronics, vol. 20(6), pp. 3257-3263, 2015 [Preprint]
Control theory
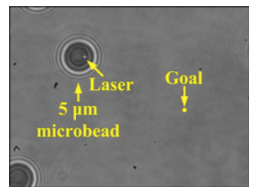
Understanding the stability properties of complex nonlinear systems is of fundamental importance in many fields, from engineering (stability of robot manipulators, chemical processes, etc.) to biological sciences (stability of neuronal networks for instance). Contraction theory is a recently-developed theory which provides powerful stability results for large classes of nonlinear systems. We have extended this theory to stochastic dynamics and used it to study the manipulation of micro/nanoparticles using optical tweezers, synchronization phenomena in networks of nonlinear artificial and biological systems subject to stochastic perturbations, such as networks of neuronal oscillators.
Selected papers
- X. Yan, C.-C. Cheah, Q.-M. Ta, Q.-C. Pham. Stochastic dynamic trapping in robotic manipulation of micro-objects using optical tweezers. IEEE Transactions on Robotics, vol. 32(3), pp. 499-512, 2016 [Preprint]
- Q.-C. Pham, J.-J. Slotine. Stochastic contraction in Riemannian metrics [Preprint]
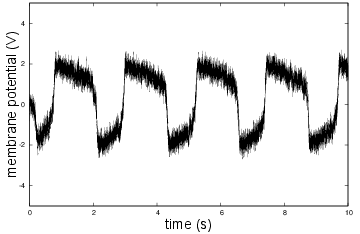
- N. Tabareau, J.-J. Slotine, Q.-C. Pham. How synchronization protects from noise. PLoS Computational Biology, vol. 6(1), e1000637, 2010 [Online]
Human locomotion
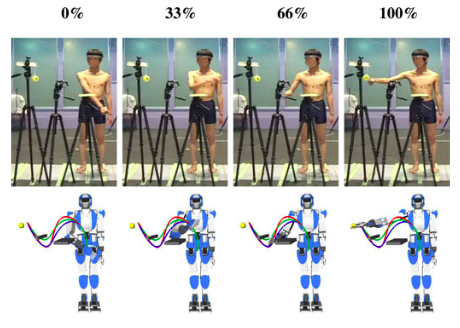
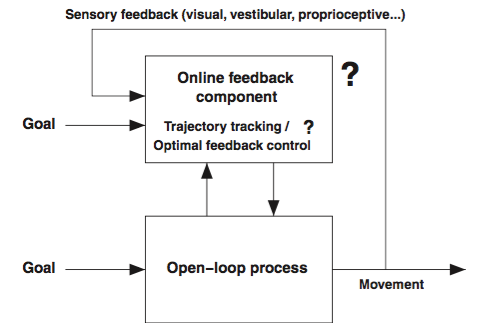
Concepts from robotics and control theory can help understand how humans plan and control their movements. We have recently provided a novel understanding of how humans generate locomotor trajectories based on optimal and feedback control theory. This understanding of human locomotion at the level of whole-body trajectory in space thus draws connections with the studies of animal navigation, potentially enabling the study of the contributions of supra-spinal structures, including the cerebellar and cortical ones, to the production and regulation of locomotion in humans.
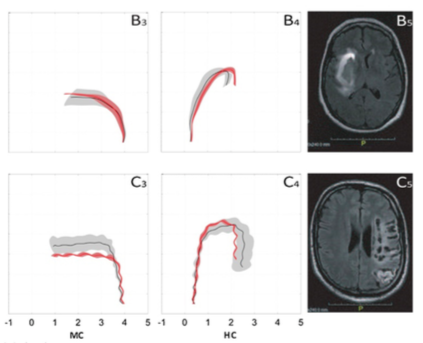
Currently, we are investigating these contributions by studying how different neurological pathologies (induced by neurodegenerative processes or following brain strokes) affect the different components of locomotion. Such a study will advance our understanding of both normal and pathological locomotion, in particular, of the neural structures that underlie the different components of the planning and control of goal-oriented locomotion. This will also lead to novel diagnosis and treatment evaluation protocols for locomotor disorders based on the analysis of locomotor trajectories.
Selected papers
- H. Hicheur, C. Boujon, C. Wong, Q.-C. Pham, J.-M. Annoni, T. Bihl. Planning of spatially-oriented locomotion after focal brain damage in humans: a pilot study. Behavioural Brain Research, vol 301, pp 33-42, 2016 [Preprint]
- Q.-C. Pham, A. Berthoz, H. Hicheur. Invariance of locomotor trajectories across visual and gait direction conditions. Experimental Brain Research, vol. 210(2), pp. 207-215, 2011 [Preprint]
- Q.-C. Pham, H. Hicheur. On the open-loop and feedback processes that underlie the formation of trajectories during visual and nonvisual locomotion in humans. Journal of Neurophysiology, vol. 102(5), pp. 2800-2815, 2009 [Preprint]