SINGABOAT: NTU Maritime robotx team 2022

Task 2: Follow the Path

This task is modelled after the “Traverse Navigation Channel” task from the 2019 Virtual RobotX competition. The AMS must deploy a UAV to map the challenge task, and then use this to guide the WAM-V through a path defined by sets of buoys, where each set is a pair of red/green coloured buoys. The exact buoy types may vary from what was used in the Virtual RobotX competition. Obstacles may be included within and around the path.
Solution and results
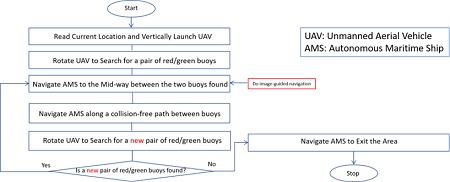
Our solution is highlighted in the above flowchart.
The experimental results are as follows:
...