SINGABOAT: NTU Maritime robotx team 2022

Task 3: Follow the Path
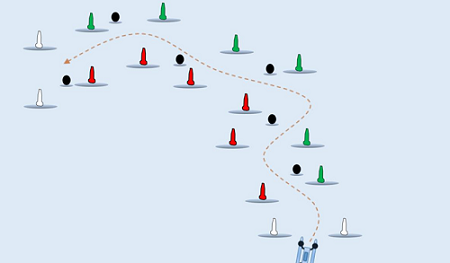
This task consists of a set of white buoys, followed by six pairs of red and green buoys, followed by another set of white buoys. The AMS detects the pathway and enters though one set of white buoys, from either end. The AMS navigates between the red and green buoys and exits between the other set of white buoys (see Figure 5), without making contact with any obstacles (round black buoys). These obstacles are placed at random within the task area. Teams may use a UAV to aid in accomplishing this task.
Solution and results

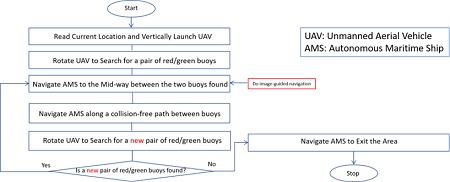
Our solution is highlighted in the above flowchart.
The experimental results are as follows:
...