SINGABOAT: NTU Maritime robotx team 2022

Task 9: UAV Search and Report
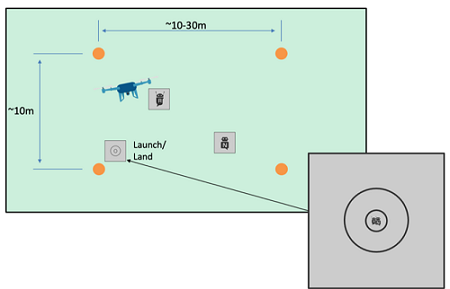
This task can be attempted by any team once they have demonstrated that their UAV can autonomously launch and land safely. This UAV task is conducted on land and is designed to mimic that of a search and rescue. For this task, the UAV launches from a designated start point, conducts a search of a field marked by four orange markers, detects and determines the location of two distinct objects in the field, and lands at the designated end point. Teams may implement any search pattern; however, the UAV must stay within the boundary of the task. Teams report the object and its geographic location.
Solution and results
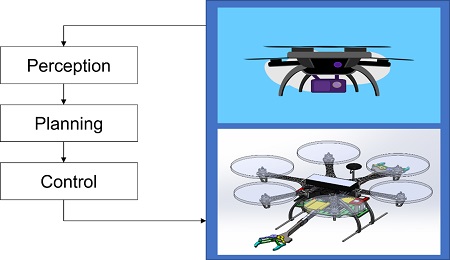
Our solution is highlighted in the above flowchart.
The experimental results are as follows:
...